Automated robotic microinjection system for batch zebrafish injection
Published in Bioengineering & Biotechnology, Electrical & Electronic Engineering, and Protocols & Methods
Introduction:
Zebrafish are regarded as a powerful model organism. The zebrafish genome has been fully sequenced and has 74.1% homology with humans. Zebrafish also offer other experimental advantages, such as transparent embryos, easy breeding, rapid development, external fertilization, in vitro development, and multiple organs with regenerative capacity, which have been extensively used in studies of genetics, developmental biology, neurobiology, oncology, regeneration and stem cell research, disease models and drug screening, cellular biophysical analysis and more.
As an efficient method of transporting external substances into cells, microinjection plays a crucial role in biological experiments. Therefore, developing microinjection technology for zebrafish can profoundly impact biomedical research. A widely used microinjection method, manual microinjection has low efficiency and poor stability limitations. It is also time-consuming and costly to train skilled operators. The above limitations are severe, especially considering the demands of high-intensity and high-repeatability batch microinjection. Therefore, developing a robotic microinjection system for zebrafish samples is essential to improving the injection efficiency and success rate and further liberating human operators.
Background:
Certain studies have made significant advances in autonomous microinjection in zebrafish embryos. Xie et al. presented a robot-assisted microinjection system for zebrafish, but their system could complete only a single sample microinjection in one task and was not suitable for large-scale microinjection tasks. To reduce puncture force and thereby reduce physical damage to embryos, Shang et al. proposed a 7-DOF rotation thrust micro-robotic system, which was also not suitable for batch microinjection tasks. Distinct from these studies, Wang et al. presented a fully automated robotic system for microinjection of batch zebrafish embryos at a speed of 15 zebrafish embryos per minute. However, their system did not apply to already developed zebrafish larvae, which limited the application scenarios of automatic microinjection systems. In addition, Huang et al., Lu et al., and Feng et al. researched force feedback systems for batch injection of zebrafish embryos. Yet, these systems were also unable to complete the microinjection of zebrafish larvae.
Developing a robotic microinjection system for zebrafish larvae is more challenging than for zebrafish embryos because the larvae are well-developed organisms with more complex internal and external structures. Their developing organs make it more difficult for injection tools to identify and locate target sites. In addition, the larvae already have vitality and may move to change their position under the stimuli induced by needles. Nevertheless, with the development of robotics and machine vision technology in recent years, significant achievements have been made in automatic microinjection research for zebrafish larvae. Zhuang et al., Qian et al., and Zhang et al. have all achieved automatic microinjection for zebrafish hearts. Zhang et al. also presented an integrated microfluidic system for zebrafish larval heart microinjection with a cardiac injection success rate of 94%; however, the average microinjection time of one sample was 75 seconds. Significantly, the current studies have achieved sufficient injection accuracy in zebrafish larvae at the expense of time, which is inadequate when facing high-throughput requirements. Particularly in some disease models and drug screening studies, both zebrafish batch embryos and batch zebrafish larvae must be injected with drugs to observe their effects. Regrettably, no research has successfully implemented an integrated system capable of autonomously conducting batch microinjection of zebrafish embryos and larvae.
Conclusion:
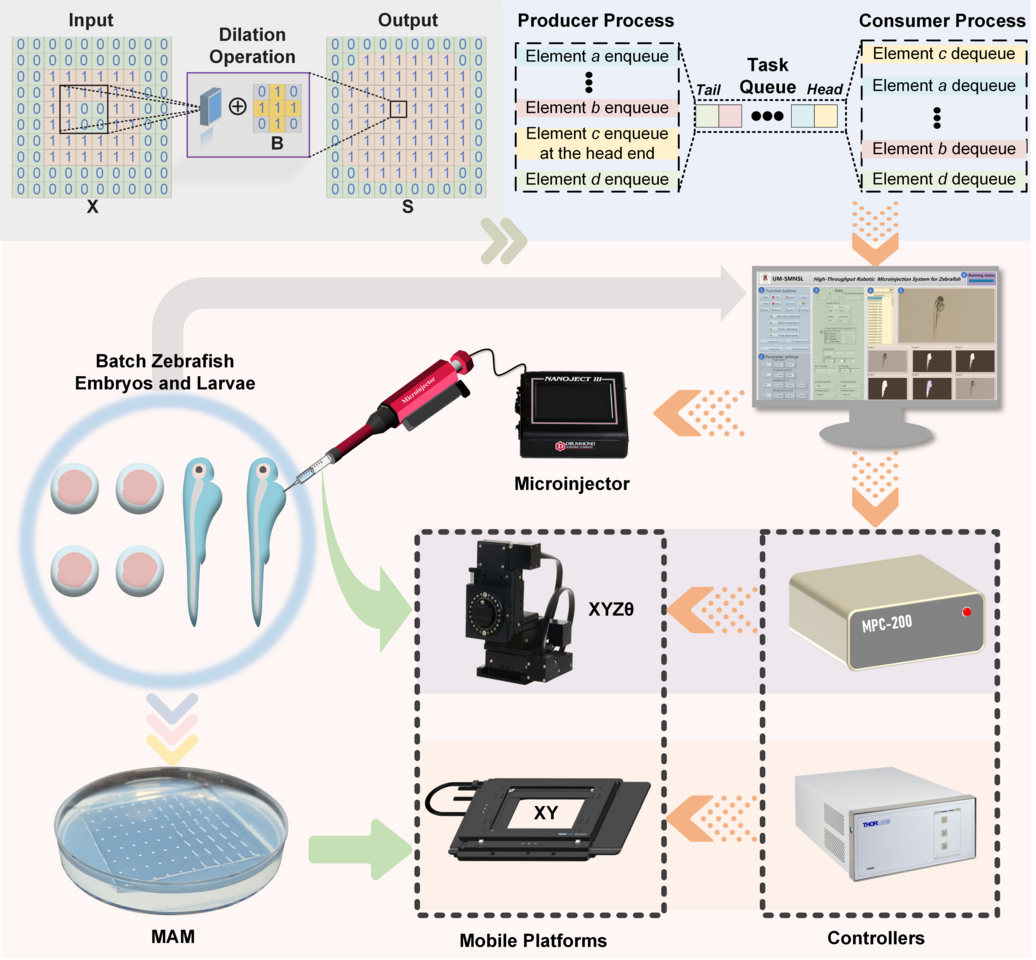
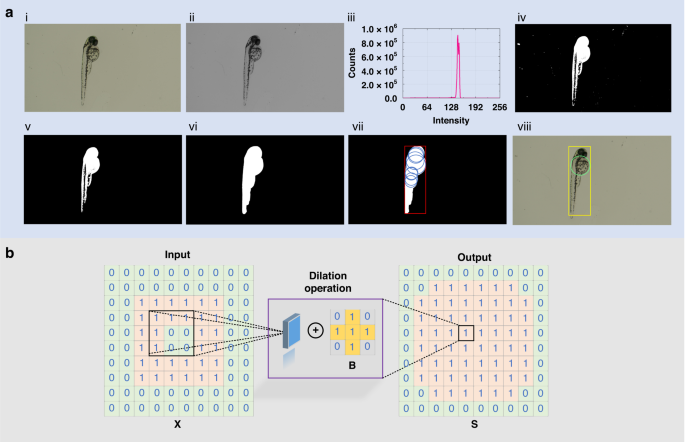
In this paper, a novel robot microinjection system dedicated to batch injection of both zebrafish embryos and larvae has been developed. The system includes a vision recognition algorithm based on an automatic threshold and excessive dilation to simultaneously identify the center of the zebrafish embryo and the center of the larval yolk. In addition, specialized operating software is built with a program framework based on an efficient producer-consumer model and a user-friendly UI designed to facilitate operation. Moreover, a novel microstructural agarose medium is designed and manufactured to immobilize batches of zebrafish embryos and larvae simultaneously, and a prototype system consisting of multiple hardware devices is developed. In addition, a novel and efficient automatic microinjection workflow is proposed to realize high-throughput microinjection. Finally, experimental tests are conducted to assess the performance of the developed system. Through microinjection of a batch of zebrafish embryos and larvae, the injection success rate reached 92.05%, the survival rate was 93.83%, and the single successful injection time was only 13.88 s, values that are significantly better than those recorded for manual injections. These results reveal that our system can provide automatic microinjection of zebrafish embryos and larvae with excellent efficiency, a high success rate, a high survival rate, and sufficient stability. Due to the advantages mentioned above, the automatic microinjection system holds significant potential for biological and pharmaceutical research applications. It facilitates the timely injection of materials into batches of zebrafish embryos and larvae, particularly in the context of large-scale screening of biomolecules or drug compounds.
Follow the Topic
-
Microsystems & Nanoengineering

This journal, with a target for a high-end journal for years to come, seeks to promote research on all aspects of microsystems and nanoengineering from fundamental to applied research.


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in