Flexible Tactile Sensing Systems: Challenges in Theoretical Research Transferring to Practical Applications
Published in Bioengineering & Biotechnology, Materials, and Physics
As robotics, wearable tech, and human-machine interfaces evolve, the demand for high-performance tactile sensors that can feel like human skin is surging. Now, researchers from the University of Science and Technology Beijing and South China University of Technology, led by Prof. Xiang Lin and Prof. Wenjie Wu, have published a comprehensive review on flexible tactile sensing systems, charting a clear path from theoretical innovation to practical, scalable applications. This work offers a timely roadmap for translating lab-scale breakthroughs into next-generation intelligent systems.
Why Flexible Tactile Sensors Matter
- Human-Like Perception: Modern tactile sensors mimic human skin by detecting pressure, temperature, texture, and vibration—enabling robots to interact safely and intelligently with their environment.
- Multimodal Integration: Combining multiple sensing modes (e.g., piezoresistive, capacitive, triboelectric, optical) allows for richer data and more accurate decision-making in real time.
- AI-Driven Intelligence: With embedded machine learning algorithms, tactile systems can now recognize materials, predict slip, and even learn from touch—pushing robotics toward true autonomy.
- Real-World Challenges: Despite rapid progress, key hurdles remain: signal drift, environmental interference, manufacturing scalability, and the gap between lab performance and industrial reliability.
Innovative Design and Features
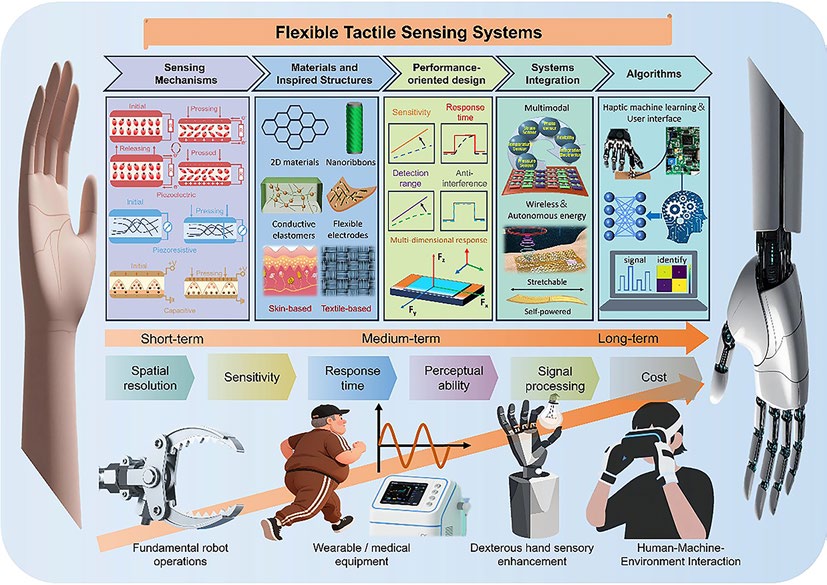
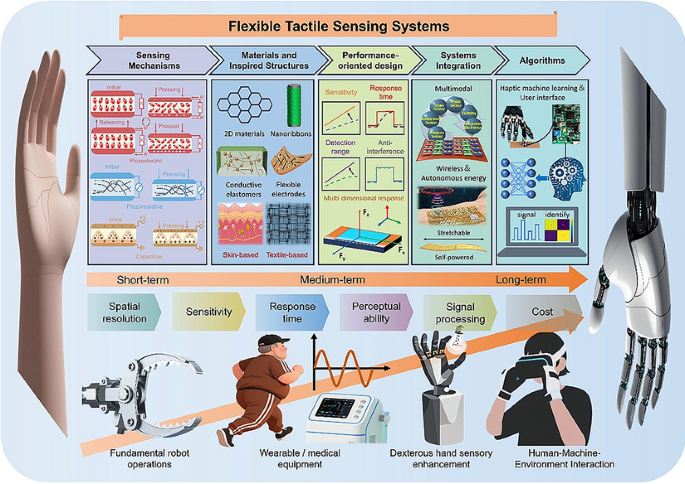
- Mechanism Diversity: The review covers six major transduction mechanisms—piezoresistive, capacitive, piezoelectric, triboelectric, magnetic, and optical—each optimized for specific applications like e-skin, prosthetics, or soft robotics.
- Bioinspired Structures: From fingerprint-like ridges to spider-web patterns and cilia arrays, nature-inspired microstructures enhance sensitivity, stretchability, and multimodal sensing.
- Material Innovations: Graphene, MXene, CNTs, conductive elastomers, and hybrid composites are tailored for high sensitivity, wide detection range, and mechanical durability.
- System Integration: Advanced packaging, 3D printing, textile embedding, and wireless communication modules enable seamless integration into wearable devices and robotic systems.
Applications and Future Outlook
- Robotic Manipulation: Tactile sensors empower robotic hands to grasp fragile objects, detect slip, and perform precision tasks in unstructured environments.
- Healthcare & Wearables: From smart gloves to prosthetic limbs, tactile systems enable real-time health monitoring, rehabilitation, and human-like feedback.
- Human-Machine Interaction: Touch-sensitive interfaces, VR/AR systems, and intelligent wearables are becoming more intuitive and responsive.
- Challenges & Strategies: The review outlines critical bottlenecks—such as sensor drift, crosstalk, and scalability—and proposes solutions through materials engineering, algorithm optimization, and standardized evaluation frameworks.
This comprehensive review not only synthesizes the latest advances in flexible tactile sensing but also sets a forward-looking agenda for intelligent, robust, and scalable tactile systems. With continued interdisciplinary collaboration, the next generation of robots and wearable devices will not just touch—they will understand. Stay tuned for more innovations from Prof. Lin and Prof. Wu’s teams as they push the boundaries of tactile intelligence!
Editor of Nano-Micro Letters, which is an Open-Access, peer-reviewed journal reported papers that have at least one dimension ranging from a few sub-nanometers to a few hundreds of micrometers. The journal is published by Springer Nature and indexed by SCI, EI, SCOPUS, Pubmed, etc. The 2025 JCR Impact Factor is 38.5. The 2025 CiteScore is 58.9.
Follow the Topic
-
Nano-Micro Letters
Nano-Micro Letters is a peer-reviewed, international, interdisciplinary and open-access journal that focus on science, experiments, engineering, technologies and applications of nano- or microscale structure and system in physics, chemistry, biology, material science, and pharmacy.


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in