When Images Become Sorting Signals in Droplet Microfluidics
Published in Bioengineering & Biotechnology
A choice hidden in every moving droplet
Under the microscope, droplets rarely feel like abstract data points. They move quickly, one after another, each carrying a small experimental possibility. One may contain a cell, another a microalga, another a particle, and many may contain nothing of interest at all. In droplet microfluidics, this is both the promise and the difficulty. We can generate thousands of tiny experiments, but we still have to decide, in real time, which ones are worth keeping.
For many droplet sorting systems, that decision is made through fluorescence. A target is labelled, its optical signal is detected, and the corresponding droplet is sent into a collection channel. This strategy is powerful and has become essential in many high-throughput biological assays, especially when molecular specificity is required.
But fluorescence is not always the most natural way for a sample to reveal itself. Some objects are difficult to label. Some samples should be kept as undisturbed as possible. In other cases, the useful information is already visible: the colour of a microalga, the size of a particle, the position of an object inside a droplet, or a morphological pattern that an experienced observer would notice immediately.
This practical observation led to the central question behind our work: could a droplet be sorted not because it emits a fluorescent signal, but because the system can recognise what is inside it?
We did not set out to replace fluorescence-based sorting. That would be neither realistic nor desirable. Fluorescence remains indispensable when molecular specificity is required. Instead, we wanted to connect a different kind of information, the droplet image, to the physical act of sorting. The key step for us was not treating images as data, but making them actionable within the short transit window of a moving droplet.

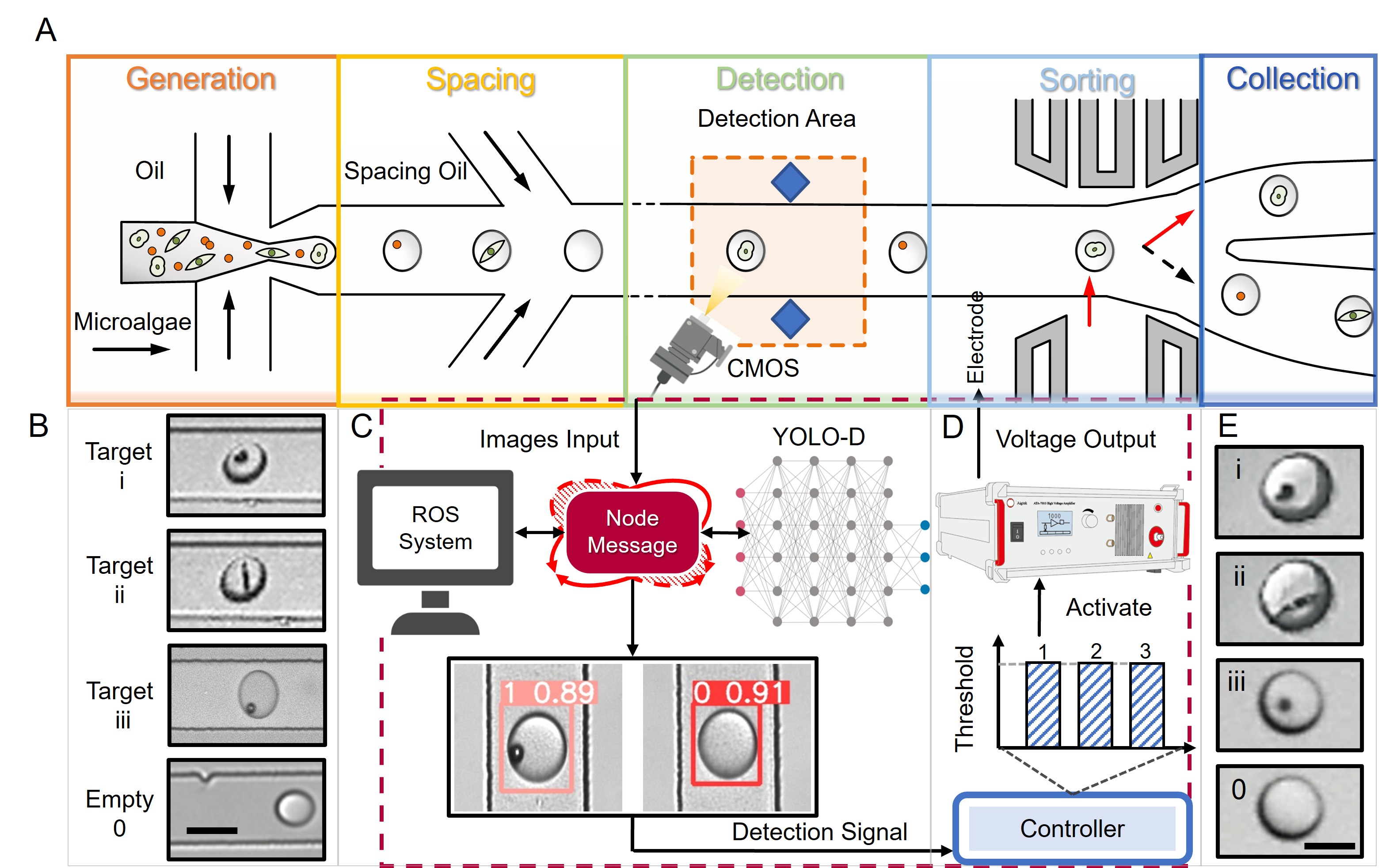
Figure 1. From droplet generation to droplet selection. Each moving droplet may carry a different cell, particle, microalga, or reaction. The key question is which droplets should be collected.
Making images actionable
At first, image-guided sorting sounds straightforward. A camera watches the droplets, an algorithm recognises the target, and the chip sorts the selected droplet. In a static image, that might be a computer-vision problem. In a flowing microfluidic channel, it becomes a timing problem.
A droplet does not pause while the system thinks. It enters the field of view, moves downstream, reaches the sorting junction, and disappears into one channel or another. During that brief journey, the image must be captured, analysed, assigned to the correct droplet, and converted into an actuation signal at precisely the right time. If the delay is wrong, the system may identify one droplet correctly but actuate the next one. Good recognition would still produce bad sorting.
This was the main design challenge of our intelligent label-free droplet sorting platform. The system combines real-time image recognition with dielectrophoretic actuation. A camera records droplets as they pass through the imaging region. A YOLO-based detection model recognises droplets containing the target object. The controller then triggers a timed actuation signal at the downstream sorting junction, guiding selected droplets into the collection channel.

Figure 2. From image to action. A droplet image is captured, analysed by the recognition model, linked to a delay-control step, and converted into dielectrophoretic actuation at the sorting junction.
The important point is that the recognition model is only one part of the system. The field of view, flow rate, detection latency, delay time, electrode position, and actuation response all have to match. For this reason, we treated the platform as a detection-to-actuation pipeline rather than a vision model attached to a microfluidic chip. In droplet sorting, information becomes useful only when it can be acted upon. The image must become a decision, and the decision must become a force.
The chip design was developed around this requirement. We used liquid-metal electrodes positioned close to the sorting junction to generate a local non-uniform electric field for dielectrophoretic droplet actuation. This arrangement helped convert the recognition output into physical droplet deflection in a compact and responsive format. The electrodes were not simply an accessory to the algorithm. They were the physical endpoint of the decision process.
One of the most memorable moments in this work was not seeing a detection box appear on a screen. It was watching the corresponding droplet change its path at the junction. At that moment, the image was no longer only a record of what had passed through the chip. It had become an instruction for what should happen next.
What label-free sorting can add
We tested the platform using visually identifiable targets, including microparticles and microalgae. Microalgae provided an especially intuitive example because their visible colour and morphology make them suitable for testing whether image features alone can guide sorting. At the same time, they also remind us why label-free sorting is not trivial. Their positions in droplets vary. Their appearances may change. Some droplets contain one target, some contain multiple targets, and some contain none.

Figure 3. Label-free sorting of visually identifiable droplets. Representative examples show that droplets containing particles or microalgae can be recognised from image features and enriched after sorting.
This variability is not a distraction from the real problem. It is the real problem. Many biological and particle-based samples carry information in spatial and morphological forms, not only in a single optical intensity. A human observer may quickly recognise that one droplet looks different from another, but a practical sorting platform must make that judgement repeatedly, quickly, and consistently while the droplets are still moving.
The value of our work lies in a modest but useful shift. Droplet images are not used only for later inspection. They become real-time inputs that guide experimental action. The system does not simply observe droplets as they pass through the chip. It uses visual information to decide what should happen next.
There are clear limits. Image-guided label-free sorting depends on image quality, target visibility, model training, droplet stability, and sample heterogeneity. If the relevant feature cannot be seen, or if molecular specificity is required, fluorescence or other detection methods remain necessary. Its strength lies in a complementary space: samples where visible phenotypes are informative, labelling is difficult, or sample perturbation should be minimized.
Droplet microfluidic systems are often valued because they are small, fast, and efficient. But they can also become more selective. When real-time recognition is linked to physical actuation, a microfluidic chip can begin to respond to what it sees while the experiment is still unfolding. For us, that is the message behind the paper: a droplet image can be more than data. Under the right conditions, it can become a decision.
Follow the Topic
-
Microsystems & Nanoengineering
This journal, with a target for a high-end journal for years to come, seeks to promote research on all aspects of microsystems and nanoengineering from fundamental to applied research.

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in