4D sensor perception in relativistic image processing
Published in Earth & Environment, Electrical & Electronic Engineering, and Mathematics
Explore the Research
4D sensor perception in relativistic image processing - Scientific Reports
Scientific Reports - 4D sensor perception in relativistic image processing
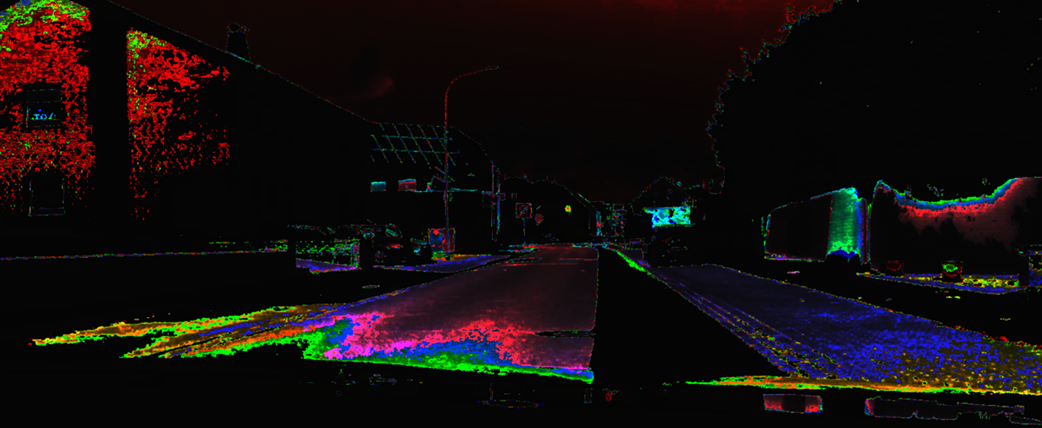
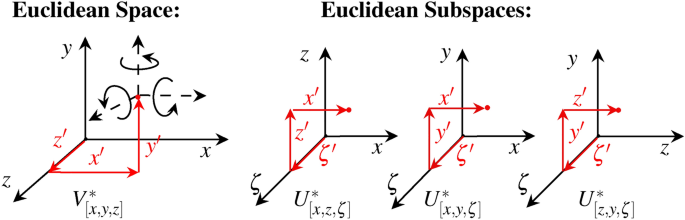
Our paper introduces a novel approach to position and depth estimation using 4D sensor perception in relativistic image processing. By integrating the theory of relativity with temporal sensor and image data, we process information in a 4D space model with 10 degrees of freedom, including 4 translations and 6 rotations. This method allows for the temporal prediction of a user's position and environmental changes, as well as the extraction of depth and sensor maps. Our approach has potential applications in mobility, robotics, and medicine, offering new perspectives on spatial distance and position metrics. Read the full paper here.
Follow the Topic
-
Scientific Reports

An open access journal publishing original research from across all areas of the natural sciences, psychology, medicine and engineering.
Related Collections
With Collections, you can get published faster and increase your visibility.
Obesity
Publishing Model: Hybrid
Deadline: Apr 24, 2026
Reproductive Health
Publishing Model: Hybrid
Deadline: Mar 30, 2026