Back(packing) to physical health: A hands-free wearable balance aid using gyroscopic actuation
Published in Electrical & Electronic Engineering

Falls and fall-related injury can result from a number of disorders affecting the body’s sensory, cognitive, or neuromuscular systems, or from external factors, such as pushes, tripping, or slipping.
Balance aids currently used in daily life and rehabilitation clinics are helpful but far from perfect. Canes, walkers, crutches, and handrails modify posture and prevent the hands from being used during activities like opening doors, carrying shopping, or answering the telephone. Mobile harness systems and robotic gait trainers typically entail ceiling-mounted rails, requiring extensive customization of specially-designated spaces, or bulky rolling frames, which inhibit close physical contact with family members or therapists and limit movement to large open spaces with smooth flat surfaces. This makes navigating carpets, slopes, stairs, and small homes challenging, for example.
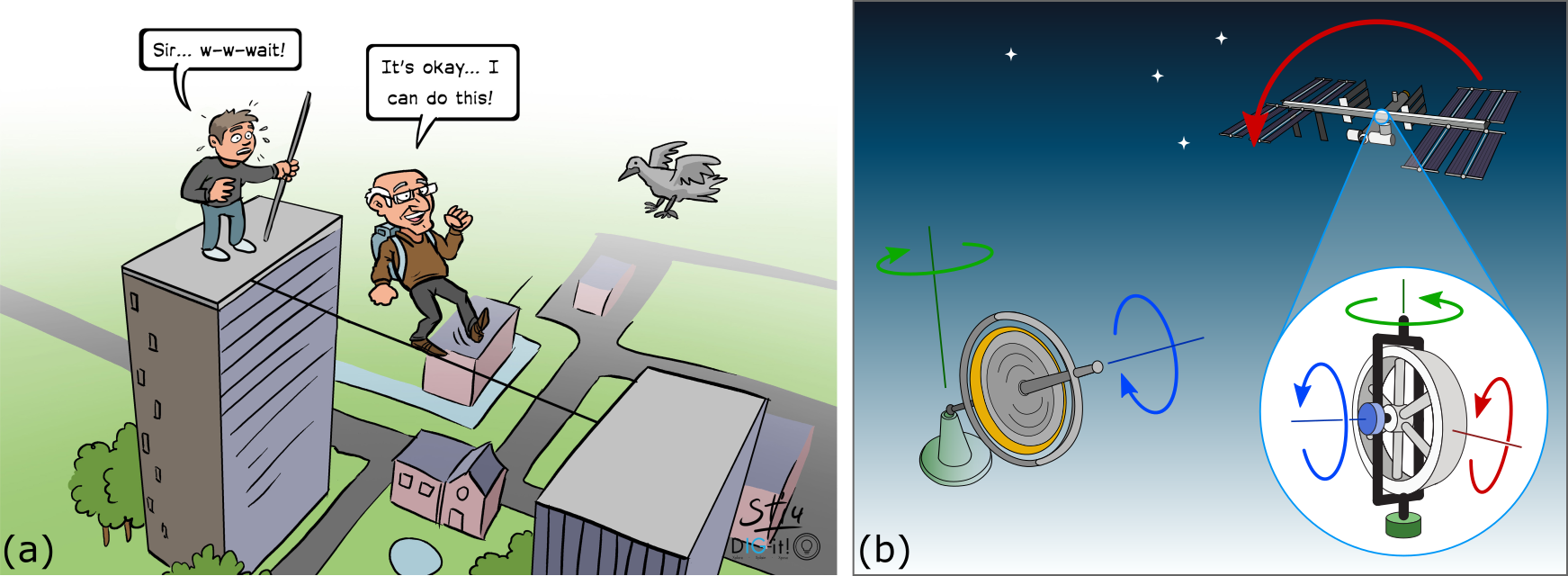
Our ideal mobile balance aid would be hands-free and practical: compact, suitable for a wide range of environments, easy to don and doff, and not inhibit normal limb movement. It could even take the form of a backpack without further cables or structures around the body (Figure 1a)! But how?
Inspiration came from space: satellites are able to change orientation in space without exerting forces or moments against the environment (Figure 1b). Moments can be exerted on the spacecraft (or human body) by modifying the angular momentum of internal flywheels, thereby inducing or preventing rotation as desired. One efficient method of doing this exploits a dynamic principle called the gyroscopic effect, which can be observed in spinning tops that resist the effect of gravity (Figure 1b). Our balance-assisting backpack, therefore, could contain such a spacecraft actuator to keep the human body in an upright and stable posture.
However, due to the unconventionality of this idea, many technical challenges arose.
To design an initial proof-of-concept prototype backpack, called the GyBAR, we assumed a person would fall like a passive inverted pendulum to enable us to scale the actuator appropriately and devise a posture-regulating balance controller (Figure 2a). However, this posture-dependence posed a practical problem when transitioning to human subjects: humans are not rigid pendula and do not always maintain the same posture at static equilibrium. This led us to experiment more openly with other simple controllers, including those that would not balance an inverted pendulum. For example, one controller emulated viscous damping that would slow the rate of falling, similar to moving through water, but not restore an upright posture. To our surprise, this was very effective at stabilizing human subjects tasked with standing or walking on narrow beams (Figure 2b). Furthermore, the amount of assistance was far smaller than initially estimated to be necessary.
In such balancing activities, then, perhaps the role of a balance aid should be that of a subtle supplement rather than a parallel virtual agent working to the same objective. Is it sufficient to delay falling motions to the point that the human can select and make the appropriate action to regain stability on their own?
Our latest article published in Nature Scientific Reports investigates this further and explores clinical application of the GyBAR with participants with chronic stroke:
In a clinical setting, the GyBAR might someday fulfill multiple roles, including balance augmentation to compensate for heavy impairments during locomotor training (perhaps in combination with a lower-extremity exoskeleton), emergency fall prevention for moderate impairments (to instill confidence and prevent sudden loss of balance due to, e.g., tripping, but otherwise not influence gait), or balance perturbations to assess or train balance recovery responses (explored recently).
Its portability could even enable therapists to visit patients at care facilities or at home to assess balance or administer training.
Our ultimate vision is that future user-centric versions (e.g., Figure 3c) may eventually be small and unobtrusive enough to be used to minimize fall risk in daily living. We hope this may be realised through close and active participation of clinicians, patients, and engineers.
Prepared by Andrew Berry and Chandrasekaran Jayaraman. Further information about this research can be found on the project webpage.
Follow the Topic
-
Scientific Reports
An open access journal publishing original research from across all areas of the natural sciences, psychology, medicine and engineering.

Related Collections
With Collections, you can get published faster and increase your visibility.
Infectious disease diagnostics
Publishing Model: Open Access
Deadline: Sep 23, 2026
AI in Education
Publishing Model: Open Access
Deadline: Oct 09, 2026

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in