Empowering Movement: How Our Robotic Device Helped Stroke Survivors Regain Strength and Confidence
Published in Bioengineering & Biotechnology and Biomedical Research
The Problem: Rebuilding Strength After Stroke
Stroke is a leading cause of long-term disability worldwide. Many survivors experience muscle weakness, particularly on one side of the body, which makes it difficult to perform basic tasks like standing up, walking, or climbing stairs. While rehabilitation can help, progress is often slow and frustrating.
We wanted to change that. Our goal was to create a device that not only assists movement but also encourages users to become more symmetrical and use their muscles less.
The Breakthrough: A Robotic Boost for Sit-to-Stand
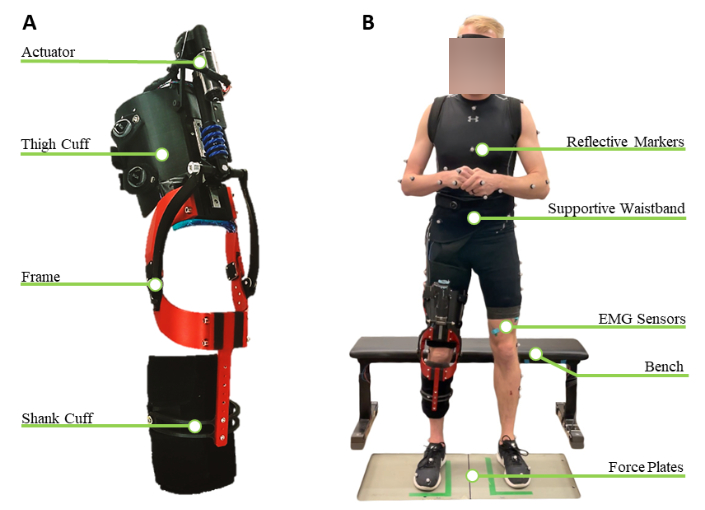
Our device is a wearable exoskeleton that supports the knee joint during sit-to-stand motion. It is designed to provide just enough assistance to help users complete the movement while still requiring them to engage their muscles.
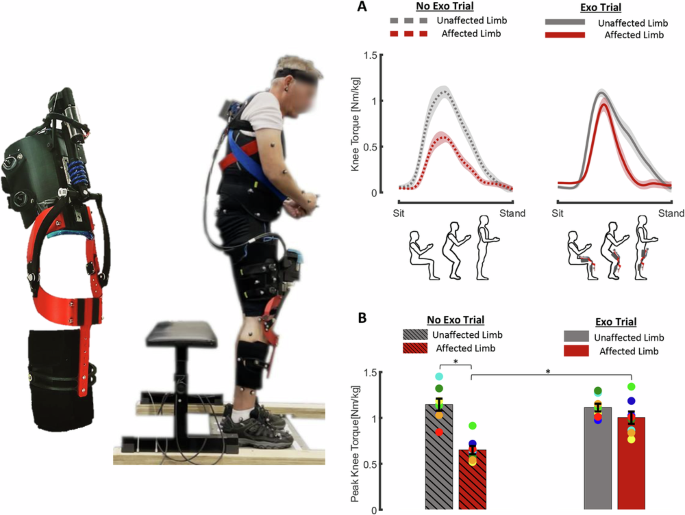
During our trials, we observed remarkable improvements. Participants not only demonstrated better symmetry between their legs and increased total knee torque (a measure of strength), but some even surprised us by performing tasks we hadn’t explicitly trained for—like squatting and climbing stairs.
Behind the Scenes: What the Participants Told Us
One of the most rewarding aspects of the study was hearing directly from the participants. Many expressed that they felt stronger and more confident after using the device. Several specifically noted that it assisted them with sit-to-stand transitions, which had been a struggle for them before.
Some even asked if they could continue using the device after the study ended. That kind of feedback is rare in research, and it meant the world to us.
The Challenge: Getting the Control Just Right
Of course, the road to success wasn’t easy. One of our biggest challenges was figuring out how to control the device in a way that felt natural and responsive.
Initially, we attempted a position-based control system designed to move the device according to the user’s body position. However, we quickly encountered issues. The system proved inconsistent and often lagged behind the user’s actual movements. It simply wasn’t accurate enough.
That’s when we turned to electromyographic (EMG) control, using electrical signals from the muscles themselves to guide the device. This approach proved to be a game-changer. Because EMG signals occur just before a muscle contracts, the device can anticipate the user’s movement and respond in real-time. The result was a much smoother, more intuitive experience.
Why EMG Control Made All the Difference
Think of EMG control as a conversation between the user and the device. Rather than waiting for the body to move and then reacting, the device listens to the muscles and prepares to assist even before the movement begins.
This made a significant difference during sit-to-stand transitions, where timing and coordination are essential. With EMG control, the device could deliver support precisely when it was needed.
It also helped us achieve something even more important: consistency. With position-based control, results varied from session to session. With EMG, we observed much more reliable improvements overall.
Looking Ahead: What This Means for Rehabilitation
Our study is merely the beginning, revealing a future where wearable robotics could greatly aid stroke rehabilitation—not just in clinics, but also in the homes and communities of individuals.
Imagine a world where stroke survivors can regain their independence more quickly, with less frustration and greater hope. A world where technology enhances human effort rather than replacing it. That’s the vision we’re working on.
We’re continuing to refine the device, explore new control strategies, and expand our testing to include more participants. There’s still much to learn, but we’re excited about where this journey is headed.
Final Thoughts: Science with a Human Touch
At its core, this project wasn’t just about robotics or biomechanics; it was about people who have faced enormous challenges and are fighting every day to reclaim their lives.
We’re proud of our technical achievements, but we’re even prouder of the moments when a participant stood a little taller, walked a little farther, or smiled a little wider because of what we built together.
That’s what makes all the effort worthwhile.
Follow the Topic
-
Communications Engineering
A selective open access journal from Nature Portfolio publishing high-quality research, reviews and commentary in all areas of engineering.

Related Collections
With Collections, you can get published faster and increase your visibility.
Engineering the future of 2D transistors: scaling, p-doping, and contact strategies
Publishing Model: Open Access
Deadline: May 31, 2026
Microgrids and Distributed Energy Systems
Publishing Model: Hybrid
Deadline: Jun 30, 2026



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in