Tunable Magnetic Field Control for Next-Generation Medical Microrobotics
Published in Social Sciences, Bioengineering & Biotechnology, and Electrical & Electronic Engineering
To enable precise magnetic manipulation of therapeutic agents, including magnetic microcarriers, soft magnetic robots, and magnetic nanoparticle swarms, we developed a tunable magnetic end effector (TME) integrated with collaborative robotic arms for advanced medical applications. Magnetic actuation has become a powerful tool in microrobotics, supporting minimally invasive interventions, targeted drug delivery, and soft robotic systems. Yet, despite its promise, generating precise and spatially controllable magnetic fields across flexible and clinically relevant workspaces remains a major challenge.
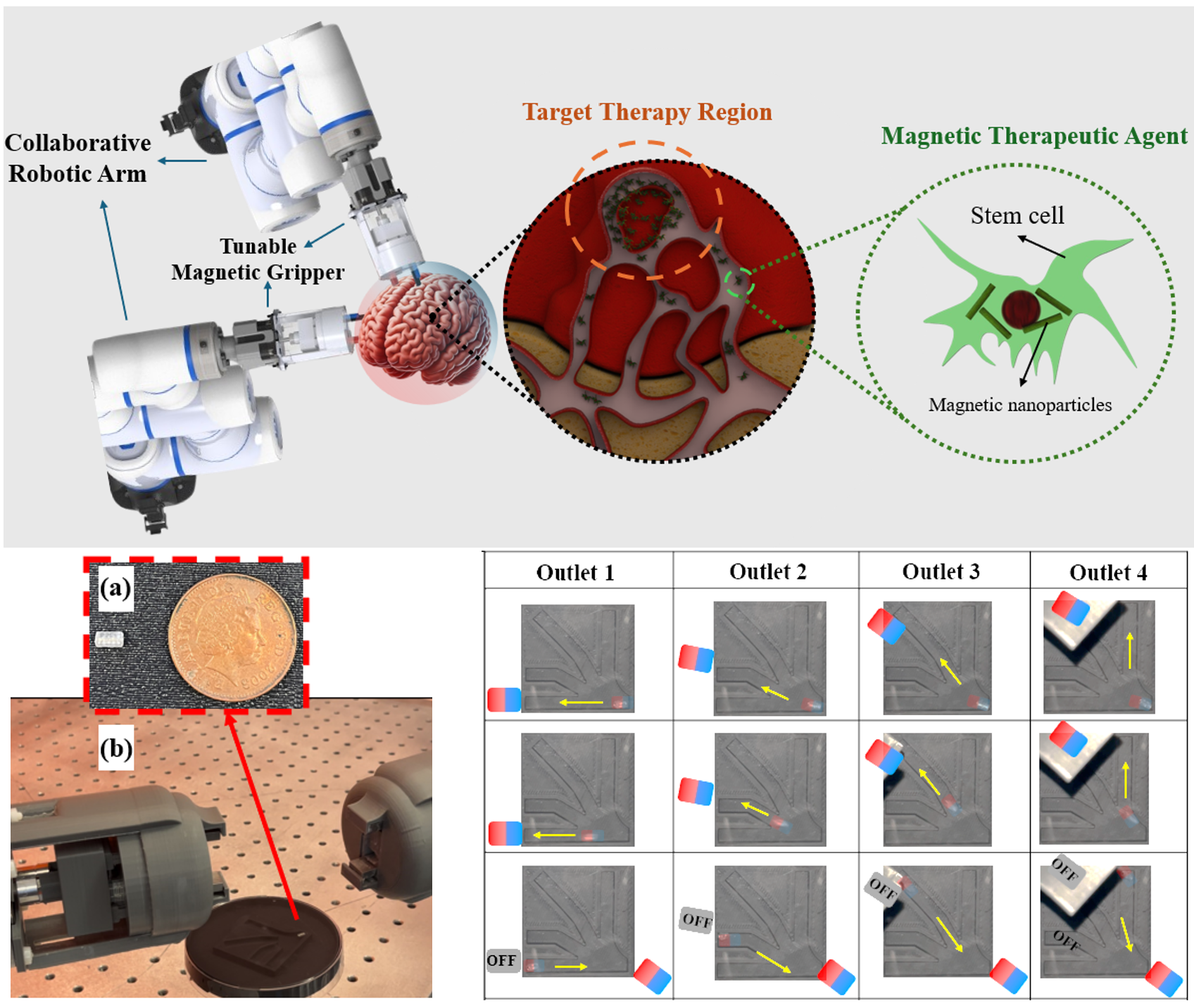
Unlike conventional electromagnetic coil systems, which are often bulky, geometry-constrained, and prone to overheating, the proposed permanent-magnet-based approach offers compact architecture built on commercially available robotic platforms. The system eliminates thermal concerns, provides a reconfigurable workspace, and allows selective ON/OFF magnetic control in localized regions.
In this work, we introduce a robotic tunable magnetic end effector capable of dynamic ON/OFF magnetic field switching, together with a dual-TME configuration that enables magnetic field control across multiple regions of the workspace. To further enhance adaptability, we developed a data-driven artificial neural network framework that predicts and optimizes magnetic field generation based on desired strength and direction. The system can produce tunable magnetic fields ranging from 0 to 12 mT (in experimental setting) with controlled gradients, while maintaining low prediction errors in both magnitude and orientation. By combining a collaborative robotic arm with an internally actuated tunable magnet, the platform achieves seven degrees of freedom, enabling precise and reconfigurable magnetic manipulation without extensive mechanical repositioning.
We demonstrate the versatility of this approach through multiple medical microrobotics applications, including steering millimeter-scale untethered magnetic carriers, controlling the shape and tip deformation of fully soft continuum magnetic robots, directing magnetic nanoparticle swarms, and generating multi-region magnetic actuation with controllable field-free points. The dual-TME configuration significantly expands the controllable workspace and enables localized magnetic modulation, opening promising directions for minimally invasive procedures such as endoscopy, targeted therapy, and microsurgery.
Overall, this work establishes a foundation for portable, adaptive, and data-driven magnetic manipulation systems designed to advance the capabilities of next-generation medical magnetic robots.
Follow the Topic
-
Communications Engineering

A selective open access journal from Nature Portfolio publishing high-quality research, reviews and commentary in all areas of engineering.
Related Collections
With Collections, you can get published faster and increase your visibility.
Applications of magnetic particles in biomedical imaging, diagnostics and therapies
Publishing Model: Open Access
Deadline: May 31, 2026
Integrated Photonics for High-Speed Wireless Communication
Publishing Model: Open Access
Deadline: Mar 31, 2026

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in