MEMS Electrochemical Angular Accelerometers: A Paradigm Shift for UAV Attitude Control
Published in Bioengineering & Biotechnology and Electrical & Electronic Engineering
The Inspiration: Breaking the Chain of Derivative Delays
In the rapidly evolving world of aerial robotics and Unmanned Aerial Vehicles (UAVs), stability is everything. Whether battling gusty winds or executing aggressive maneuvers, a drone relies heavily on its flight control system to maintain a precise attitude. Traditionally, control architectures like Incremental Nonlinear Dynamic Inversion (INDI) achieve this by tracking angular acceleration. However, there has always been a hidden compromise: this critical higher-order kinematic quantity is not directly measured; instead, it is derived by differentiating the time-series signals from MEMS gyroscopes.
As any control engineer knows, numerical differentiation is a dangerous tool. It inherently amplifies high-frequency noise and introduces detrimental phase lags. This creates a fundamental bottleneck: to suppress the noise, you must apply heavy filtering, which further worsens the time lag, ultimately eroding the phase margin and limiting the controller's agility.
We asked ourselves a simple but ambitious question: Why guess and derive when we can measure directly? This question set us on a journey to transition electrochemical sensing technology from passive motion monitoring to active, high-fidelity flight control.
The Challenge: Shrinking the Fluid Subsystem
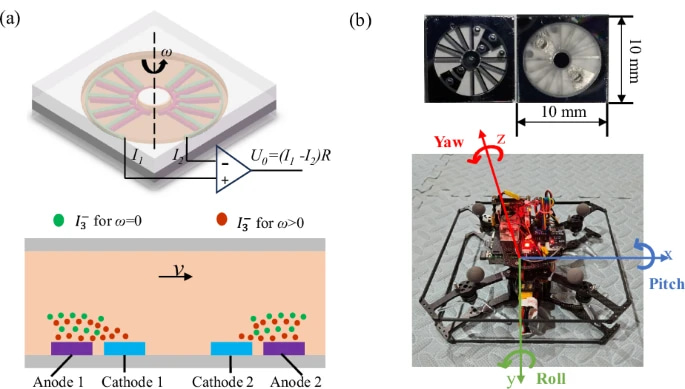
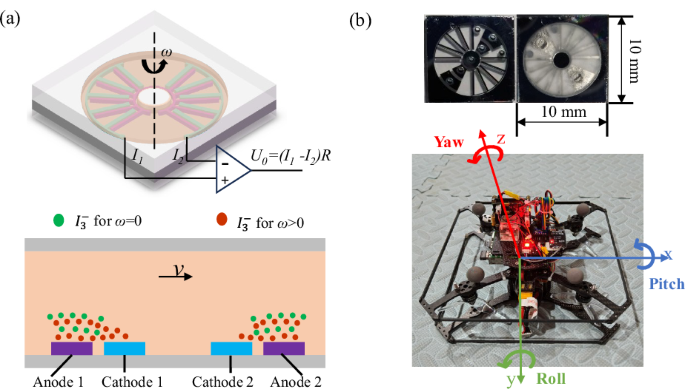
Electrochemical (or molecular electronic) sensors are legendary in seismology for their ultra-low noise floor and exceptional low-frequency sensitivity. They work by using a liquid electrolyte as the inertial mass; when an external acceleration occurs, the fluid flows over microelectrodes, disrupting a concentration gradient and generating a measurable redox current.
However, adapting this technology for miniaturized UAV platforms seemed almost impossible. Traditional electrochemical sensors suffer from massive packaging footprints, complex manual assembly, and limited dynamic ranges. To integrate them into a drone's Pixhawk or autopilot stack, we needed to achieve a drastic form-factor reduction while expanding the device's operational bandwidth without sacrificing its intrinsic sensitivity.
The Innovation: 3D Plate Electrodes and Multi-Physics Design
Our breakthrough came from a synergy of microfluidic optimization and advanced MEMS fabrication. Instead of relying on conventional, flat planar electrodes that offer limited surface interaction, we proposed a novel integrated plate-type electrode structure.
Using COMSOL Multiphysics, we solved the bidirectional coupling between rotational laminar fluid dynamics and tertiary current electrochemical distributions. The simulations confirmed that these microscopic 3D plate electrodes acting as obstacles in the annular channel expand the fluid storage volume and augment hydrodynamic resistance. This significantly enhances mechanical-to-electrical transduction sensitivity.
o turn this into reality, we developed a robust three-layer Glass-on-Silicon (GOS) MEMS fabrication protocol. By using deep reactive ion etching (DRIE) on a high-conductivity silicon wafer, we precisely formed 200-µm-tall plate electrodes and simultaneously eliminated redundant silicon areas outside the active zones. This crucial step suppressed parasitic parallel conductance and wiped out background noise. The resulting chip, measuring just 10 × 10 ×1.5 mm³, achieved a peak sensitivity of 4.5 V/(rad/s²) at 0.01 Hz, an ultra-low power consumption of 2.4 mW, and a spectacular noise floor of 3.12× 10-6(rad/s2)/Hz-1/2 at 1 Hz.
To bridge the gap between the sensor's sub-Hertz intrinsic bandwidth and the high-frequency requirements of flight control, we designed a multi-order hardware compensation circuit. This reconfigured the system's pole-zero distribution, successfully extending the -3 dB operational response to 10 Hz.
From Turntable to the Sky: Closed-Loop Flight Testing
The ultimate test of any sensor designed for robotics is real-world deployment. We mounted our MEMS electrochemical angular accelerometer (EAA) coaxially along the yaw axis of a custom quadrotor UAV, interfacing it via a high-precision 32-bit ADC to a Raspberry Pi 4B, which fed real-time data into the flight control computer at 250 Hz.
Before takeoff, reliability benchmarks on an angular vibration turntable revealed a striking discovery: the direct-measurement EAA signal closely matched the differentiated gyroscope data (consistency > 0.97) but offered an 8 to 12 ms absolute time advantage (phase lead) by bypassing the lag of numerical differentiation.
When integrated into the closed-loop INDI flight controller, this phase lead translated directly into superior flight performance:
-
Aggressive Maneuverability: Under step response commands, the EAA-feedback mode achieved a significantly faster rise time (0.3 s vs. 0.48 s for the gyroscope) and shorter settling times, enabling crisp, instantaneous command responsiveness.
-
Ultra-Stable Hovering: During small-angle, slow variations in a level hover, the EAA successfully captured minute dynamic variations. It suppressed the angular velocity Root Mean Square Error (RMSE) to 1.2739 °/s (compared to 1.4286 °/s in gyro mode) and reduced the maximum tracking error by nearly 20%.
The Future: A New Inertial Sensing Paradigm
This study marks the first time a MEMS electrochemical sensor has transitioned from a passive monitoring instrument to an active feedback core inside a drone's closed-loop flight control loop. By proving that fluidic inertial masses can be miniaturized, mass-fabricated, and run with high agility, we hope to unlock a brand-new direct-sensing paradigm.
Beyond rotorcraft UAVs, this direct, low-latency angular acceleration sensing technology holds vast disruptive potential for stabilization systems in robotic joints, autonomous driving, camera gimbals, and precision guided systems. We are excited to see how this liquid-core technology will reshape the future of autonomous movement in both the skies and on the ground.
For more details, please refer to our full paper published in Microsystems & Nanoengineering:
"MEMS electrochemical angular accelerometer: a paradigm shift for attitude detection and control in rotorcraft UAVs" https://doi.org/10.1038/s41378-026-01326-w
Follow the Topic
-
Microsystems & Nanoengineering
This journal, with a target for a high-end journal for years to come, seeks to promote research on all aspects of microsystems and nanoengineering from fundamental to applied research.


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in