Ultra-stable and tough bioinspired crack-based tactile sensor for small legged robots
Published in Electrical & Electronic Engineering


Tactile sensors are essential for robots to effectively interact with their environments, with applications in grasping, tactile exploration, non-prehensile manipulation, in-hand manipulation, and human-robot interaction. They are particularly crucial for off-road mobile robots for obstacle avoidance, path planning, terrain recognition, and gait analysis. The ground reaction force (GRF) is vital for legged robots' performance and automation, helping maintain balance, stability, and adaptation to various terrains.
However, challenges in durability, flexibility, sensitivity, and size have limited the use of tactile sensors in small robots (less than 1 kg). Kang et al. developed an ultra-sensitive mechanosensor inspired by a spider's sensory organ, using cracks on a metalized polymer to maximize resistance changes by applied strain. This spider-inspired sensor offers high repeatability, response speed, and low hysteresis, but its sensitivity is unsteady under repeated high-speed loads due to accumulated stress in the crack tip.
To address this issue, researchers have developed an ultra-stable, tough, and bio-inspired mechanical crack-based (ULTIMAC) strain sensor, drawing inspiration from the tear resistance of skin collagen structures. Collagen fibrils have stress redistribution properties, allowing them to rearrange under tension and prevent crack propagation. To mimic this flexible structure, a silver nanowire (Ag NW) mesh is embedded at the end of the designed crack depth, acting as a crack stop layer.
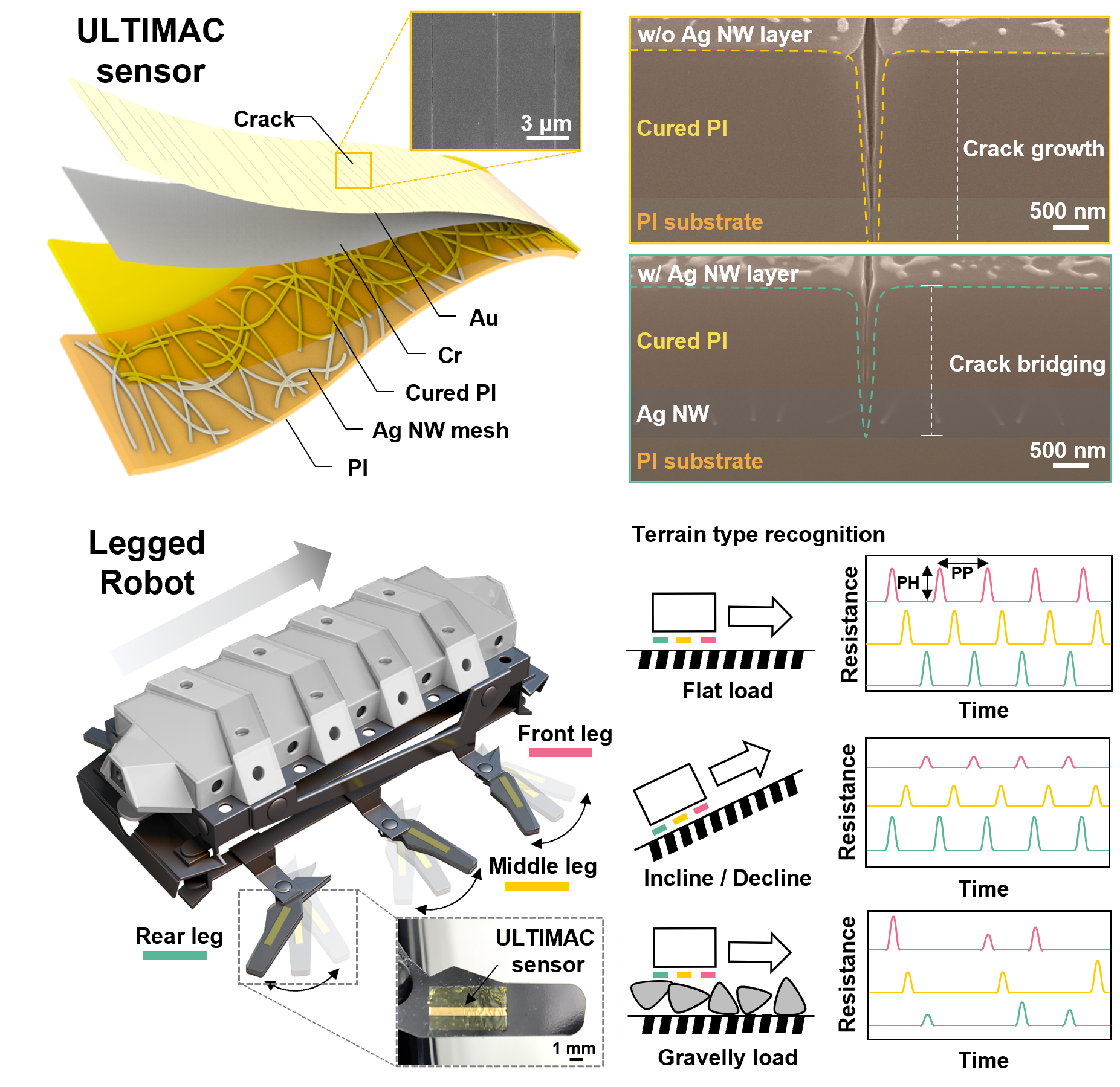
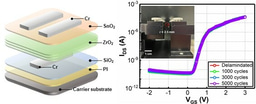
The ULTIMAC sensor boasts high sensitivity, repeatability, durability, low hysteresis, and rapid response times. It maintains a sensitivity of GF 2000 at 0.5% strain, even after 200,000 cycles of repeated loads. The sensor's thin, flexible, lightweight, compact, and highly durable design makes it suitable for integration into small-legged robots without significant structural modifications.
By implementing the ULTIMAC sensor on a legged robot's foot and analyzing the collected data, the study demonstrates the sensor's ability to help robots recognize terrain and their current state, improving control and efficiency in various environments.
The original article can be found here:
Kim, T., Hong, I., Kim, M. et al. Ultra-stable and tough bioinspired crack-based tactile sensor for small legged robots. npj Flex Electron 7, 22 (2023).
https://doi.org/10.1038/s41528-023-00255-2
Follow the Topic
-
npj Flexible Electronics

This journal publishes high-quality papers related to flexible electronic systems, including plastic electronics and emerging materials, new device design and fabrication technologies, and applications.
Related Collections
With Collections, you can get published faster and increase your visibility.
Ferroelectrics based Flexible Electronics
Publishing Model: Open Access
Deadline: May 12, 2026
Neuromorphic Circuits and Bio-inspired Systems
Publishing Model: Open Access
Deadline: Mar 31, 2026

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in