
The ability to respond rapidly and move at a fast speed is an essential driving force of evolution endowing creatures in nature. The trap closure of Venus Flytrap, as one of the fastest movements in the plant kingdom, usually takes around 300 ms to catch a fly. Soft-bodied robots emerge as the closest synthetic system analogous to living organisms with the aim to mimic their mechanical behavior and go beyond in performance.
Here, we demonstrate a series of simulation-guided, lightweight, durable, untethered and ultrafast magnetic soft-bodied robots performing large amplitude of deformations (rotation angle > 90o) at high frequencies of up to 100 Hz. Our robots can be driven with a very small magnetic field as small as 0.5 mT, which is 20 times less than that of the general magnetic robots.
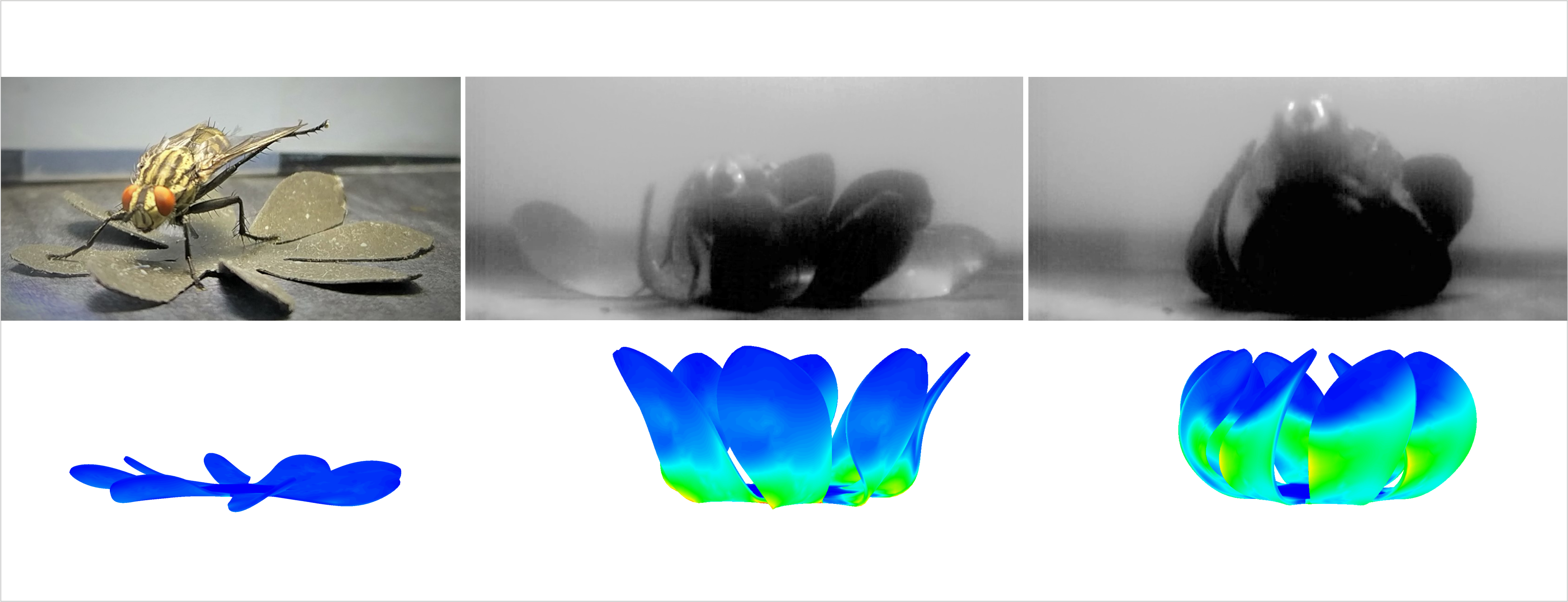
We developed a numerical model aiding the fundamental understanding of these nonlinear dynamics in ultrafast soft robots. The inspiring flower-shaped soft robot design with ultrafast actuation is able to momentarily wrap a living fly in 35 ms. The speed of closure is about eight times fast than that of Venus Flytrap.
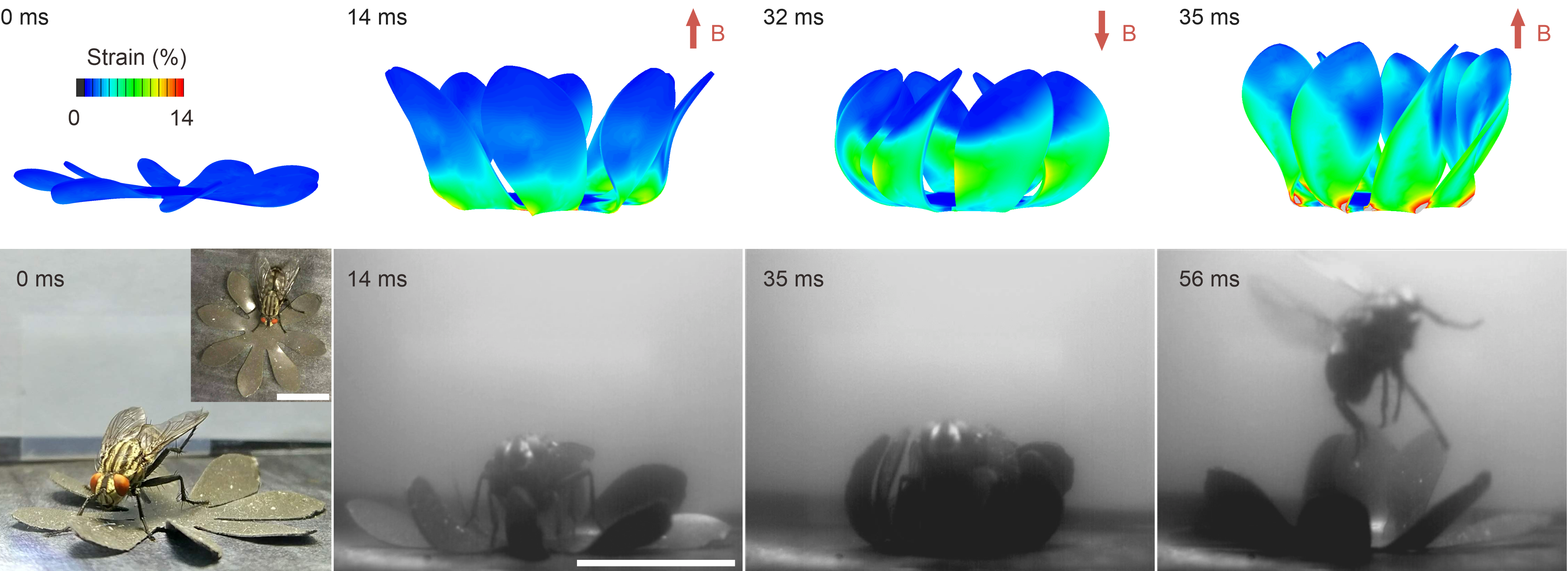
Figure 1: Simulated and experimental results of a flower-shaped magnetic soft robot highlight the predictive nature of our dynamic model and the versatile applicability of the robot due to its fast and silent actuation. It closes around a living fly momentarily and releases it again without harming the fragile insect. Scale bars, 1 cm.
When our multi-arm soft-bodied robots respond at a certain range of high frequencies, they show strongly nonlinear dynamic actuation that is named as “cross-clapping” motion, which is predicted by simulation and observed by experiments. We further analyze the roles of thickness and sizes in the typical dynamic instabilities, partial bending and collapse of our robots by both experiments and simulation.
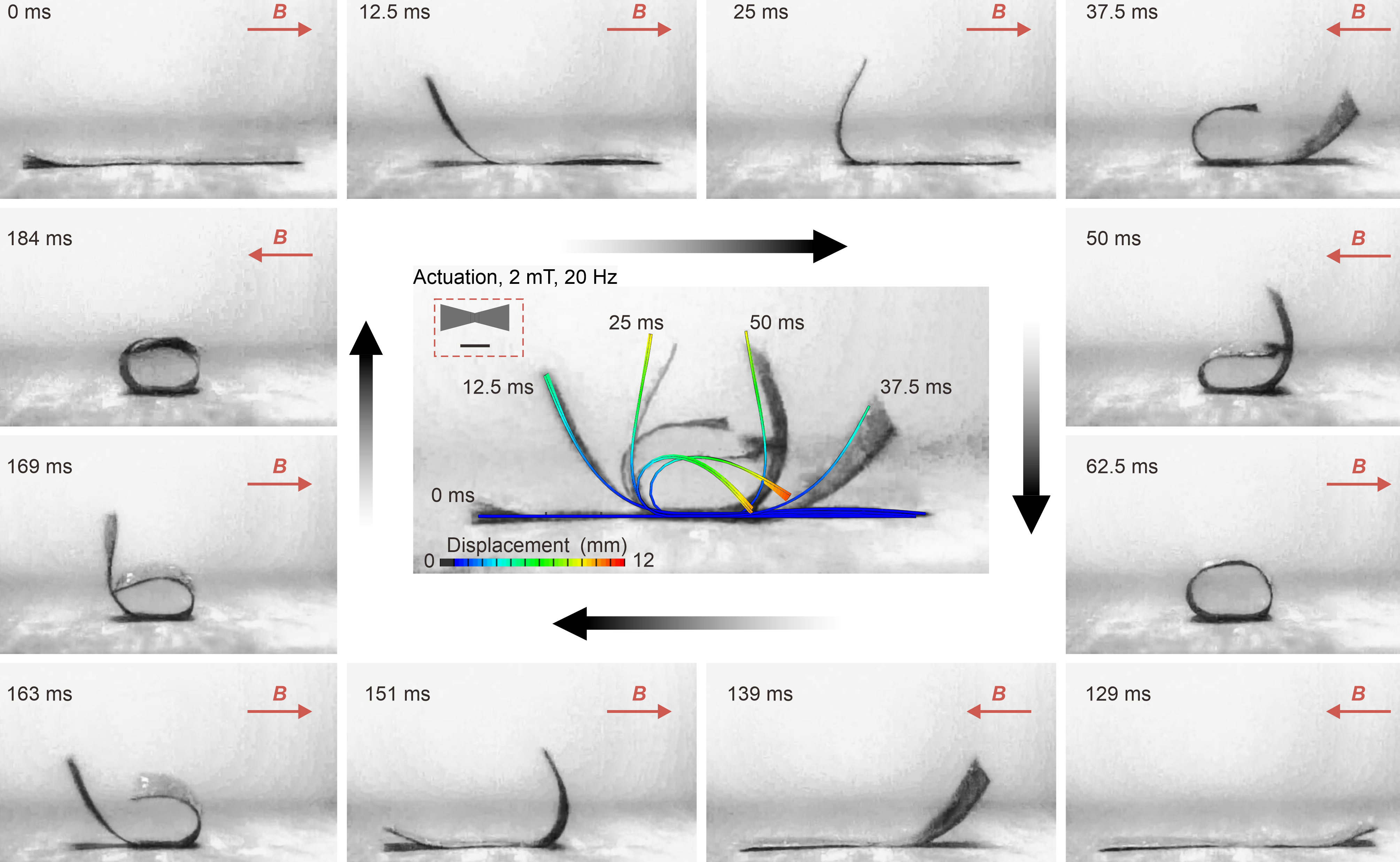
Figure 2: Asynchronous strongly nonlinear dynamic actuation of a two-arm trapezoid-shaped soft robot. Scale bar, 0.5 cm.
Our soft-bodied robots are readily fabricated using scalable methods, extremely resilient, and highly versatile, durable and multifunctional. They can walk, swim, levitate, and transport cargo being driven using external magnetic fields. This inspires new classes of soft robots that impact biological tissue engineering, confined and high-speed mechanical manipulation, and serve as working models to study fast biomechanical processes like hydro-dynamics of fast-moving organisms.
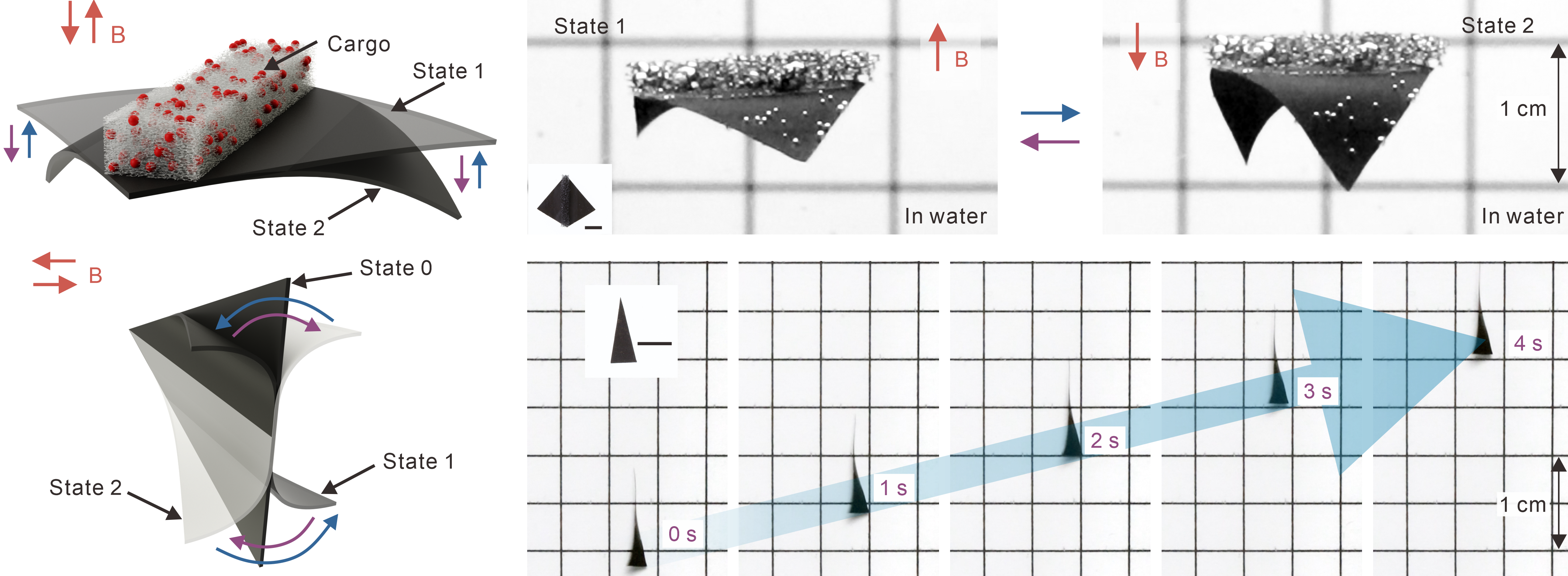
Figure 3: Two types of soft-bodied swimmers driven by magnetic field. a, Manta ray-shaped robot with a cargo swimming in water and b, Triangle-shaped swimming robot twisting around its main axis and therefore moving forward in the water.
Soft robot videos:
For more details, please see our paper “Untethered and Ultrafast Soft-bodied Robots” in Communications Materials.
Co-authors: Xu Wang, Guoyong Mao, Jin Ge, Michael Drack, Gilbert Santiago Cañón Bermúdez, Daniela Wirthl, Rico Illing, Tobias Kosub, Lothar Bischoff, Changan Wang, Jürgen Fassbender, Martin Kaltenbrunner, Denys Makarov
Follow the Topic
-
Communications Materials
A selective open access journal from Nature Portfolio publishing high-quality research, reviews and commentary in all areas of materials science.

Related Collections
With Collections, you can get published faster and increase your visibility.
Smart windows for sustainable buildings
Publishing Model: Open Access
Deadline: Oct 31, 2026
Lead-free perovskite solar cells
Publishing Model: Open Access
Deadline: Oct 31, 2026



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in