

In recent years, light-guided robotic soft actuators have attracted intense scientific attention and dramatically accelerated the development of biomimetic devices, micromanipulators, sensors and robotic technology.[1] Precise control of the moving direction is undoubtedly the most important function of soft robots. However up to now, most of light-guided robotic soft actuators must rely on meticulously controlling the spatial distribution (scanning position/direction/intensity) of light on the sample surfaces to induce the local asymmetric shape deformations, to further modulate the moving directions of soft actuators. For example, scientists shined the laser light on the rear part of the robotic actuator to generate thermal gradient stress and force it to come forward; and shined the laser light on the head part to force it to reverse backwards. In other approaches, researchers waved the laser from one side to the other side of the soft robot to force it to go right, and waved the laser in the opposite direction to force the actuator to turn left, etc. Every time when I watched these demonstration videos, I asked myself: could this directional control mode be used in micro-robots? It is hard to imagine a scenario that doctors used an extremely thin beam of light, located it through skin tissues accurately on a micron-sized specific region of a microscale soft robot planted inside organisms, and hoped it would move along a designed pathway to perform medical treatments. I thought that we should find an alternative directional control method with ease of stimulating operation, to remove the scanning direction/configuration restriction of light stimuli.
The exploration journey started from our effort in 2016 to integrate two shape morphing modes (bending and chiral twisting) into a same liquid crystal elastomer (LCE) soft actuator, by combining ultraviolet (UV) induced azobenzene trans-cis isomerization and near-infrared (NIR) triggered photothermal conversion effects.[2] Two years later, we further brought photochromic and thermochromic effects of spiropyran units into the above LCE matrix, to fabricate a UV, green, and NIR trilight-modulated tricolor-changing flower mimic soft actuator.[3] During these two studies, we found that due to the very limited light penetration capability, UV light could not efficiently drive the actuations of several-hundred-micrometer thick soft actuators, resulting in very slow photo-responsive rates. For example in the previous case,[2] bilayered LCE soft actuators (ca. 200~300 um thick) could quickly respond to photothermal stimulus in a few seconds while it took several minutes or even several hours for the UV-stimulated shape deformations to be completed. Thus, we started to design and build a non-UV light-guided multi-motion-mode soft actuator system with satisfying photo-responsive rate, which was actually the initial objective of this work.
The beginning design was to build two independent and non-interfered photothermal conversion systems responding to two different wavelength bands of NIR light, in separate regions of a hierarchical structured LCE material, so that both shape deformation modes would be efficiently triggered by two photothermal stimuli with fast photo-responsive rates. After one year of research, we prepared a dual-motion-mode shape morpher which could quickly perform both bending and curling modes in seconds timescale.
When we thought about the next research plan, I suddenly realized that this strategy might be a perfect solution to improve the moving directional control of soft robots. If we could build multiple independent photothermal conversion systems within one single LCE material, the local asymmetric shape deformations of the LCE actuator would be influenced by the photon energy absorption difference between different regions. Consequently, selective stimulation of specific domains of the hierarchical structured actuator through the modulation of multiple wavelength bands of light, would help the actuation system free of light scanning position/direction restriction. Following this logic, we successfully fabricated a three-legged walker robot, by doping three dyes responding to 520, 808 and 980 nm light respectively, into a Y-shaped LCE bilayer actuator. Separately activating the different legs of the actuator by on/off irradiation of the light with three different wavelengths enabled the turning to left or right and moving forward or backward of the walker robot in the motion (Figure 1).
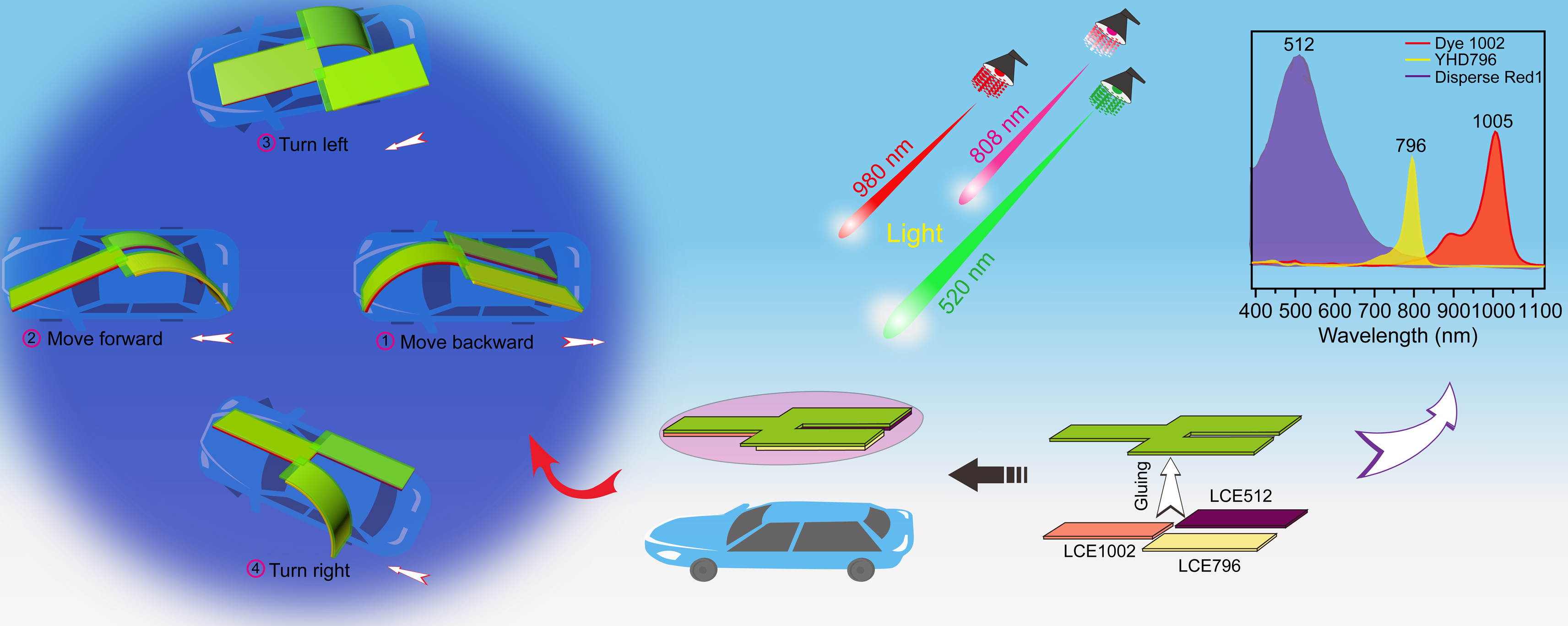
Figure 1. Schematic illustration of the three-wavelength modulated multi-directional walker robot.
Just like one reviewer said, “controlling the locomotion by turning on and off the light is easier than scanning the light on the actuator with right speed and in right position.” We believe that this strategy could be further adopted to build four or even more independent photothermal conversion systems in hierarchical structured polymeric matrices to synthesize multi-wavelength modulated soft actuators with more functionalities. In our lab, this selective stimulation strategy is now applied in fabricating microscale soft robots with complex actuation modes through 3D printing technique. More exciting results will be reported in the near future.
Read the complete story at Nature Communications.4
References
- Li, Q. Photoactive Functional Soft Materials: Preparation, Properties, and Applications. (Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim, 2019).
- Wang, M., Lin, B. P. & Yang, H. A plant tendril mimic soft actuator with phototunable bending and chiral twisting motion modes. Nat. Commun. 7, 13981 (2016).
- Zuo, B., Wang, M., Lin, B. P. & Yang, H. Photomodulated tricolor-changing artificial flowers. Chem. Mater. 30, 8079‒8088 (2018).
- Zuo, B., Wang, M., Lin, B. P. & Yang, H. Visible and infrared three-wavelength modulated multi-directional actuators. Nat. Commun. 10, 4539 (2019).
Follow the Topic
-
Nature Communications

An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.
Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Advances in neurodegenerative diseases
Publishing Model: Hybrid
Deadline: Mar 24, 2026

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in