A spin–orbit torque memristor device for sensing vector magnetic fields
Published in Electrical & Electronic Engineering
With the conventional transistor approaching its physical limits, the heterogeneous integration technology that integrates diversified functions on one chip, opens a new way and has been an industry trend in the post-Moore law period. Tremendous efforts have been devoted to this field including the integrations of sensors, MEMS, optoelectronics, RF and mm-wave devices. On the other hand, for the artificial intelligence system, sensor-enabled perceptual ability is as important as the learning ability and reasoning ability, which is generally realized by neurocomputing. At present, the detection technology of one-dimensional magnetic field is very mature. Actually, the detection of three-dimensional magnetic field is more practical. The traditional method of measuring a three-dimensional magnetic field is to use three sensors to obtain the magnitude of the magnetic field components along the three coordinate axes (x, y, and z), or to use a magnetic flux guide to deflect the magnetic field to the detection direction of planar sensors. However, these solutions have the problem that the three measured magnetic field components are not orthogonal or not in the same spatial position.
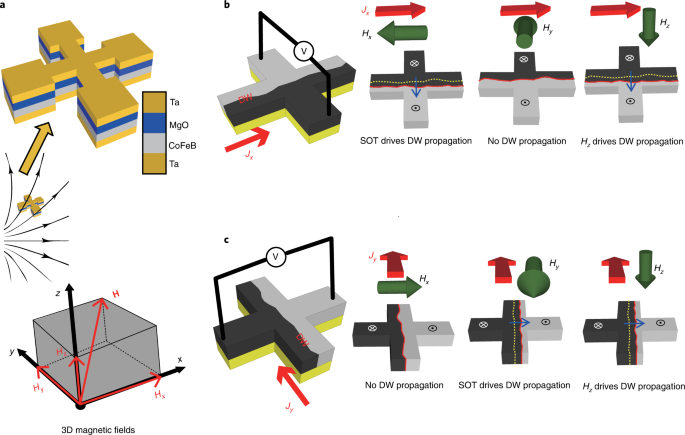
 Fig. 1 | 3D magnetic field sensing based on a Ta/CoFeB/MgO heterostructure. a, 3D sensor placed in a vector magnetic field with the definition of x–y–z coordinates. b, Schematics of AHE measurements setup and domain wall (DW) motion under Hx, Hy, and Hz when Jx is applied. The yellow dotted line is the initial position of DW and the red solid line is the final position of DW. The blue arrow indicates the direction of DW motion. c, Schematics of AHE measurements setup and DW motion under Hx, Hy, and Hz when Jy is applied.
Fig. 1 | 3D magnetic field sensing based on a Ta/CoFeB/MgO heterostructure. a, 3D sensor placed in a vector magnetic field with the definition of x–y–z coordinates. b, Schematics of AHE measurements setup and domain wall (DW) motion under Hx, Hy, and Hz when Jx is applied. The yellow dotted line is the initial position of DW and the red solid line is the final position of DW. The blue arrow indicates the direction of DW motion. c, Schematics of AHE measurements setup and DW motion under Hx, Hy, and Hz when Jy is applied.
Here we propose a single spin–orbit torque memristive device comprised of a Ta/CoFeB/MgO heterostructure and it can detect a vector magnetic field (see Fig.1). A vector magnetic field is composed of two in-plane (IP, Hx or Hy) components and one out-of-plane (OOP, Hz) component, and these three elements can lead to the displacement of domain walls in the CoFeB layer, modulating the associated anomalous Hall effect (AHE) resistance. We derive the relationships between the measured AHE resistance and the three orthogonal components, and show that they are linear for certain ranges. In particular, the sensor has a linear range between −10 and +10 Oe for IP field, and between −4 and +4 Oe for OOP field. Specifically, the relationships between Rxy (Ryx) and Hx, Hy, Hz under Jx (Jy) = ±6.8 MA/cm2 are depicted in Fig. 2a–f. Note that Rxy-Hz (Ryx-Hz) curves are unchanged when the current polarity reverses, Rxy-Hx (Ryx-Hy) curves under ±6.8 MA/cm2 are symmetrical about the horizontal ordinate, and Rxy-Hy (Ryx-Hx) curves under ±6.8 MA/cm2 always keep a constant. Based on this, we can measure two AHE resistance values under positive and negative current densities in x axis, named Rxy (+Jx) and Rxy (−Jx). According to the symmetry of R-H curves under different current polarities (Fig. 2), if the two AHE resistance values are processed with a subtraction operation, enabling the elimination of Hz contribution, the net resistance contributed by only Hx component can be obtained. Similarly, we can get the net resistance contributed by only Hy or Hz component (see Fig.3). Accordingly, one can know the magnitude and direction of the vector magnetic field by composing (Hx, Hy, Hz).
 Fig. 2 | Measured R-H curves under ±6.8 MA/cm2. a, Rxy as a function of Hz. The red and blue curves represent the variation of Rxy with Hz under Jx = ±6.8 MA/cm2, respectively. The two curves coincide with each other. b, Rxy as a function of Hx. The red and blue curves under ±6.8 MA/cm2 are symmetrical about the horizontal ordinate. c, Rxy as a function of Hy. Rxy almost keeps a constant, since no DW motion occurs under Hy. d–f, Ryx as a function of Hz (d), Hx (e), and Hy (f) under Jy = ±6.8 MA/cm2, respectively. Here, the short-dotted lines are drawn as guides to the eye.
Fig. 2 | Measured R-H curves under ±6.8 MA/cm2. a, Rxy as a function of Hz. The red and blue curves represent the variation of Rxy with Hz under Jx = ±6.8 MA/cm2, respectively. The two curves coincide with each other. b, Rxy as a function of Hx. The red and blue curves under ±6.8 MA/cm2 are symmetrical about the horizontal ordinate. c, Rxy as a function of Hy. Rxy almost keeps a constant, since no DW motion occurs under Hy. d–f, Ryx as a function of Hz (d), Hx (e), and Hy (f) under Jy = ±6.8 MA/cm2, respectively. Here, the short-dotted lines are drawn as guides to the eye.
 Fig. 3 | Net resistance contributed by Hx, Hy and Hz. a, Net resistance component R(Hx) as a function of Hx. Rxy(Jx = +6.8 MA/cm2) and Rxy(Jx = −6.8 MA/cm2) under different Hx ranging from −10 Oe to +10 Oe are processed with a subtraction operation to eliminate the contribution of Hz and obtain the R(Hx). The blue line is a linear fit to the experimental data points. b, Net resistance component R(Hy) as a function of Hy. Similarly, a subtraction operation is processed to get net resistance component R(Hy) using Ryx(Jy = +6.8 MA/cm2) and Ryx(Jy = −6.8 MA/cm2). c, Net resistance component R(Hz) as a function of Hz is obtained by an addition operation to eliminate the contribution of Hx.
Fig. 3 | Net resistance contributed by Hx, Hy and Hz. a, Net resistance component R(Hx) as a function of Hx. Rxy(Jx = +6.8 MA/cm2) and Rxy(Jx = −6.8 MA/cm2) under different Hx ranging from −10 Oe to +10 Oe are processed with a subtraction operation to eliminate the contribution of Hz and obtain the R(Hx). The blue line is a linear fit to the experimental data points. b, Net resistance component R(Hy) as a function of Hy. Similarly, a subtraction operation is processed to get net resistance component R(Hy) using Ryx(Jy = +6.8 MA/cm2) and Ryx(Jy = −6.8 MA/cm2). c, Net resistance component R(Hz) as a function of Hz is obtained by an addition operation to eliminate the contribution of Hx.
 Researchers at Huazhong University of Science and Technology, School of Optical and Electronic Information. From right to left (in the left figure): Long You (Professor), Ruofan Li (PhD student), Shuai Zhang (PhD student) and Yaodong Guan (PhD student).
Researchers at Huazhong University of Science and Technology, School of Optical and Electronic Information. From right to left (in the left figure): Long You (Professor), Ruofan Li (PhD student), Shuai Zhang (PhD student) and Yaodong Guan (PhD student).
How can we think of designing a 3D magnetic sensor in this way? This work is inspired from our study on the modulation of the resistance of Ta/CoFeB/MgO heterostructure under different external magnetic fields and current densities. Our laboratory was established in 2016, after professor Long You came to Huazhong University of Science and Technology. In the next few years, we found that the increasing write current density can gradually reduce the coercivity of the device until it reaches zero (which can be seen in our previous work: 2018 IEEE International Electron Devices Meeting (IEDM), doi: 10.1109/IEDM.2018.8614638). We also found that the current and the IP field have a continuous control effect on the resistance of the device through domain wall motion, which is acting as a memristor (Adv. Electron. Mater. 2019, 5, 1800782; Appl. Phys. Lett. 114, 042401 (2019)). Based on the previous work, we found that the influence of positive and negative currents on R-Hx and R-Hz is not the same. Using this symmetry, we can just explore the contribution of one magnetic field component to resistance. Then we design a geometrically symmetric Hall bar structure to conduct the experiments. These experimental results are consistent with the theoretical expectations we did before the experiment.
We are thankful to the editorial and the review team for providing us with constructive feedback to help us improve this work at each step. We hope that the ideas presented will be useful for the community and enable better/ efficient optimization in future.
For more information, please see our recent publication in Nature Electronics: https://www.nature.com/articles/s41928-021-00542-8
Follow the Topic
-
Nature Electronics
This journal publishes both fundamental and applied research across all areas of electronics, from the study of novel phenomena and devices, to the design, construction and wider application of electronic circuits.





Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in