Bioinspired Soft Actuator: A CTF-based Artificial Muscle for Playing Electronic Piano
Published in Chemistry

Under low input stimulation, actuators often show a low bending displacement along with severe back relaxation and irregular response characteristics restricting practicability towards real-field soft robotics. We demonstrate an electro-ionic soft actuator based on a robust metal free covalent triazine framework (CTF) that shows controllable high bending deformation under low input voltages and plays electronic piano by soft touch operation.
Most of soft robotics applications require robust soft actuators with large, fast, and stable responses at low voltages for energy conservation and safety. To achieve such ionic actuators, it is important to design compatible electrodes with high capacitance, excellent ionic and electrical conductivities as they played the key role in actuation mechanism. However, to achieve those antagonistic properties by one material researchers always face challenges such that they mostly go for composites which are somehow promising but not exactly fulfil the needs of real-field soft robotics. From the last few years our group actively involved in developing high performance electroactive ionic soft actuators using a series of 2D and 3D-nanostructural electrode materials. MXene, a new class of 2D materials having both of high ionic capacitance and electrical conductivity, showed encouraging actuation performances with good demonstration on kinetic soft robotics [1]. But, having vulnerable oxidation characteristic, it is still under consideration for long-term open-air applications. This situation necessitated to think more for the development of electrode materials having anticipated properties with robust stability in open environments.
The idea for the use CTF came from its unique porous structures and well-defined electronically conjugated frameworks with robust stability. As, porous structures provided both of massive ion-accessible surfaces which leads to increase of desired specific capacitance.
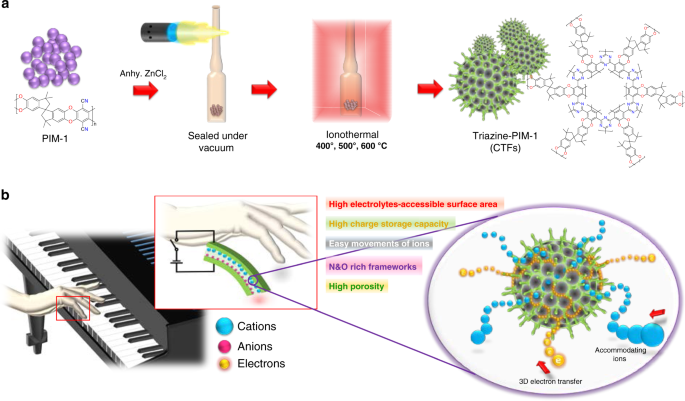
It is very crucial to choose the perfect precursor for a CTF by considering a specific application, as the ultimate properties of the CTF including surface energy, porosity, electrical conductivity, and ionic capacitance are highly affected by the structural features of the precursor. The polymer of intrinsic microporosity (PIM-1) is chosen for this study to achieve hierarchical porous structures with high nitrogen and oxygen content on the final electronically conjugated CTF frameworks. Permanent microporosity originating from its spirobisindane backbone units gives a huge platform for stress-free accommodation of electrolyte ions and dibenzo-p-dioxine moieties present in conjugation with conductive CTF serve as charge storage pockets that can boost the specific charge capacitance for controlled high bending deflection, when used in combination with PEDOT-PSS for flexible electrode in ionic soft actuator under low input voltages (Figure 1) [2].
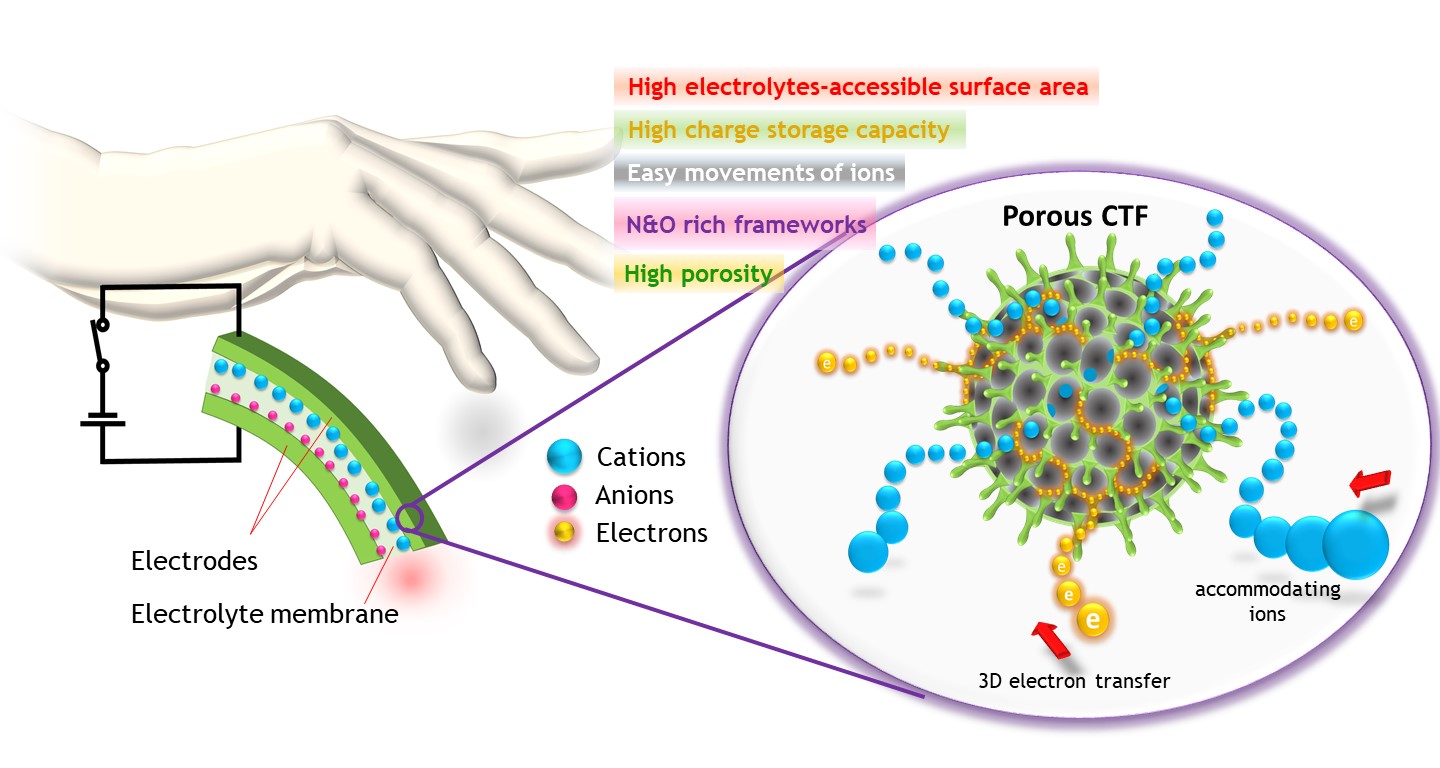
Figure 1. Schematic illustration for the utilization of CTF nanomaterials in soft touch finger..
The proposed soft actuator showed exceptionally high peak-to-peak displacement of 17.0 mm under the ultralow square voltage of ±0.5 V, with frequency of 0.1 Hz and 4 times lower phase delay in harmonic response compared with that of a pure PEDOT-PSS-based actuator. The outstanding actuation performance is mainly due to the unique physical and chemical configurations of the CTF electrode with highly porous and electrically conjugated network. The as-prepared actuators were successfully employed as an array of soft touch fingers on a fragile display, to perform soft touch task, similar to that of a real human finger; device is used to accomplish precise task that is playing complex melody (‘Happy Birthday’) on piano app.
This research findings could contribute towards the development of high-quality multi-functional robust electrode materials for high-performance ionic actuators realizing practical applications of soft robotics.
References
1. Umrao, S., Tabassian, R., Kim, J., Nguyen, V. H., Zhou, Q., Nam, S. and Oh, I. K. MXene artificial muscles based on ionically cross-linked Ti3C2Tx electrode for kinetic soft robotics. Sci. Robot. 4, eaaw7797 (2019).
2. Mahato, M., Tabassian, R., Nguyen, V.H., Oh, S., Nam, S., Hwang, W.J. and Oh, I.K. CTF-based Soft Touch Actuator for Playing Electronic Piano. Nat. Commun. 11, 1-15 (2020).
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in