Bioinspired Soft Robots based on Organic Polymer-Crystal Hybrid Materials with Response to Temperature and Humidity
Published in Chemistry

The ability of materials to respond to mechanical deformation and induce motion is the fundamental basis of lightweight, organic, dynamic materials used in the design of soft and light robots. Various biomimetic soft robots have been constructed to showcase their versatility and shape-shifting flexibility in response to stimuli. In this report, we highlight the synergistic enhancement in performance achieved through the integration of organic molecular crystals and polymers, resulting in a hybrid materials class with added hygroresponsive and thermally responsive functionalities. The dynamic elements produced exhibit a response time in milliseconds, representing a significant improvement over other common types of actuators. This combination of molecular crystals with polymers brings to light the previously overlooked potential of crystals as materials with specific applications in soft robotics and related fields.
The hygroscopic mechanical function of biological structures, such as inflorescences, seeds, or tendrils, can often be approximated by simple deformations resulting from differential strains caused by the expansion or contraction of different tissues at different rates, which can ultimately manifest as bending or twisting. Specifically, bending occurs when the bilayer changes its curvature due to the different tensile forces between the layers. Figure 1a illustrates the response of the inflorescence of a rainfed plant, Zephyranthes grandiflora, to wetting in a schematic representation. To simulate some of these movements, we developed artificial dynamic elements that bend in response to external stimuli. The "skeleton" of the active elements is a combination of elastic crystals and polymers of three organic compounds, as shown in Figure 1b, where the polymers serve as driving elements and the crystals act as substrate materials.
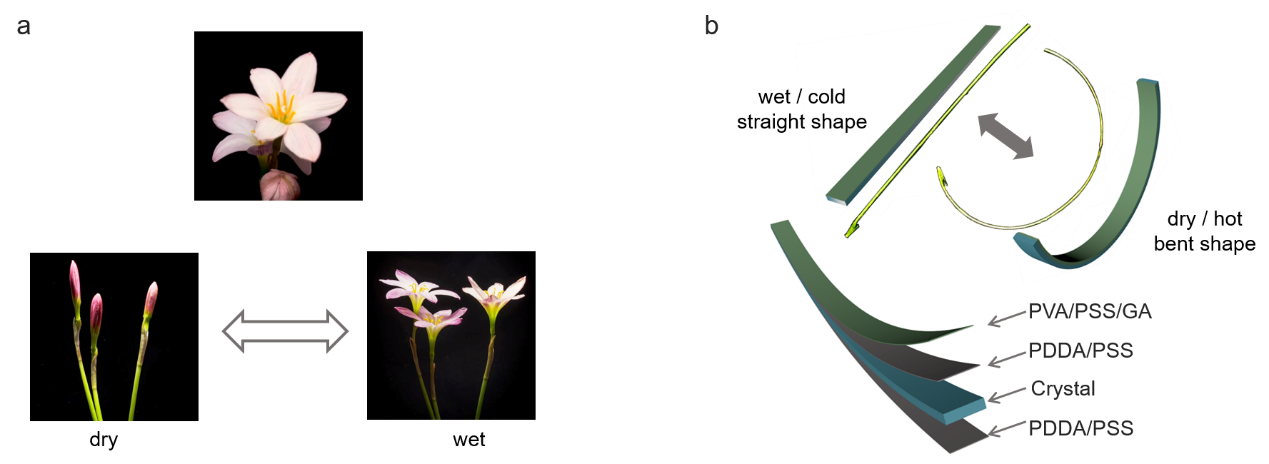
Figure 1. a Photographs of the rain lily (Zephyranthes grandiflora) and its response to dry/wet conditions. b Schematic of the layered structure of the organic polymer-crystal hybrid materials P2//1‒3. Bending occurs when the organic polymer-crystal hybrid materials are placed in dry or hot environment due to the differential strain that develops at the phase boundaries.
The blend of organic polymer and crystal comprises two components. The substrate of the blend consists of PDDA/PSS/1-3, while a mixture of PDDA and PSS is added to enhance the adhesion of the PVA/PSS/GA layer to the crystal surface. As temperature increases or humidity decreases, water molecules trapped inside the polymer are released, causing shrinkage. This reduction in length ultimately causes the material to bend. Conversely, as temperature decreases or humidity increases, the hydroxyl groups of the polymer create hydrogen bonds with the absorbed water molecules, causing the material to swell and regain its original shape (figure 2).
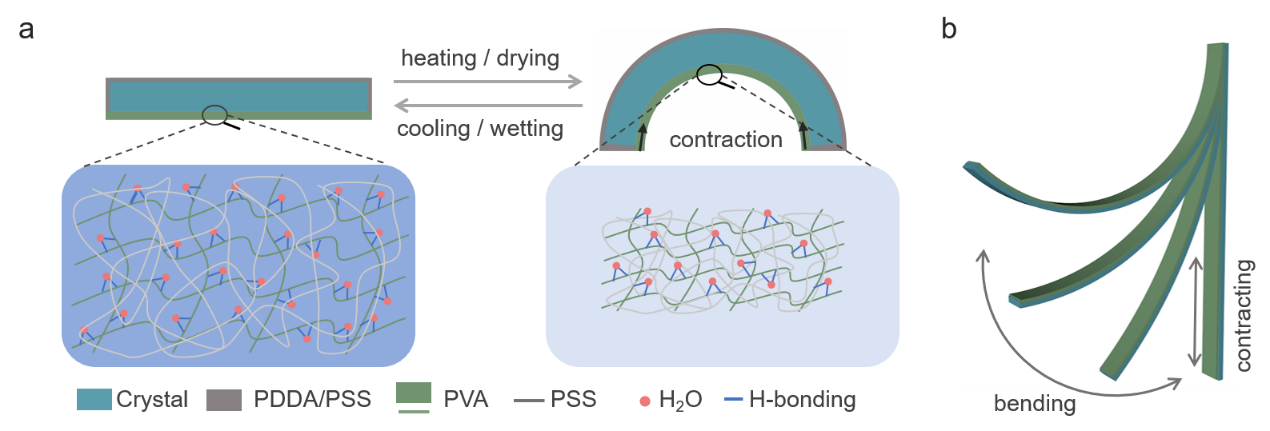
Figure 2. a Schematic demonstration of the design principle of bendable hybrid crystalline actuators. b Principles of bending of the organic polymer-crystal hybrid materials.
Achieving high mechanical robustness, operational cyclability for long-term use, and high response sensitivity are critical prerequisites for developing materials for actuation in reconfigurable devices, such as soft robots. In this study, we demonstrate that the bending capability of the hybrid crystals remains virtually unchanged even after 1000 cycles, as depicted in Figure 3a,3b. The response rate of the hybrid element was also examined, and the results show that the hybrid material responds within milliseconds to changes in humidity and temperature (figure 3c,3d). Notably, the kinetic response of these hybrid crystals to changes in humidity and temperature outperforms the response of similar materials to humidity and light. These findings highlight the potential of this material for practical applications in soft robotics and other reconfigurable devices.
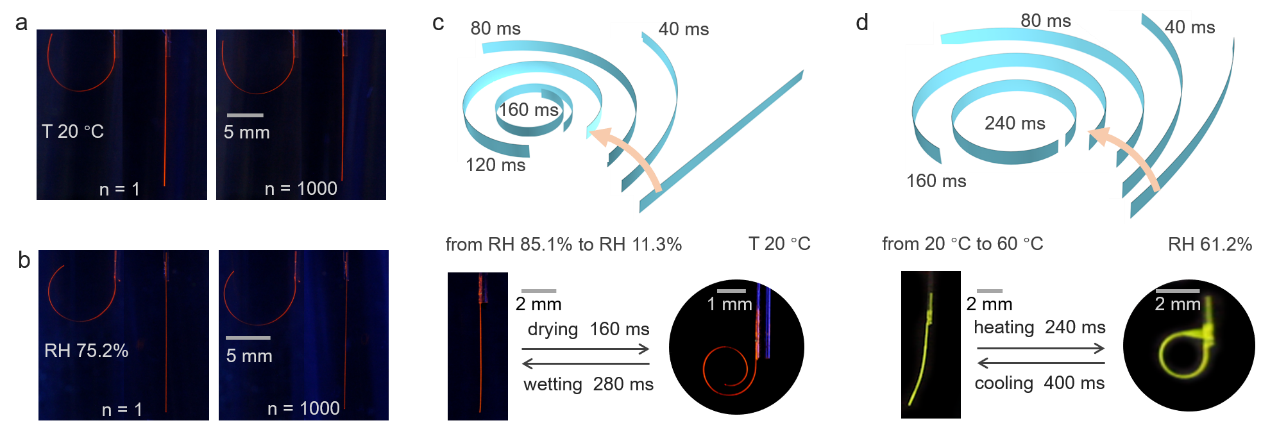
Figure 3. a,b Photographs of P2//3 of straight and bent shapes of circle 1 and circle 1000 which responds to humidity (a) and temperature (b) respectively under UV light for enhanced contrast against the background. c,d Rate of response of P2//3 to humidity (c) and P2//2 to temperature changes (d) and images of the actual crystals in straight and bent states.
The core principle of robotic manipulation is the reconfiguration of materials or active devices, such as remodeling and motion, to achieve tasks such as spatial transportation, grasping, and releasing objects. We investigated the potential of using hybrid elements as simple soft robot components that respond to changes in humidity and temperature. Hybrid elements have strong and reversible deformations, such as bending, that can translate momentum to other objects and facilitate repositioning in space. Our results show that hybrid elements have a high sensitivity to these environmental changes, making them promising candidates for use in soft-bodied robots. These findings may inspire the development of new strategies for designing and fabricating soft robotic components with enhanced performance and functionality.
The potential of hybrid materials as sensitive and responsive actuating elements that can be driven by changes in temperature and humidity is demonstrated. Models of biomorphic forms and motions, including those of rainforest plants, a mimosa, spider motion, and a miniature grasping device, showcase the dynamic capabilities of the hybrid material. The development of simple walking robots that can move on a smooth silicon wafer by utilizing the actuator's response to alternating heat and humidity is also presented. These results highlight the versatility of hybrid materials in providing both visual appeal and practical functionality as actuating elements. The findings offer new possibilities for the design and implementation of future soft-bodied robots (Figure 4).
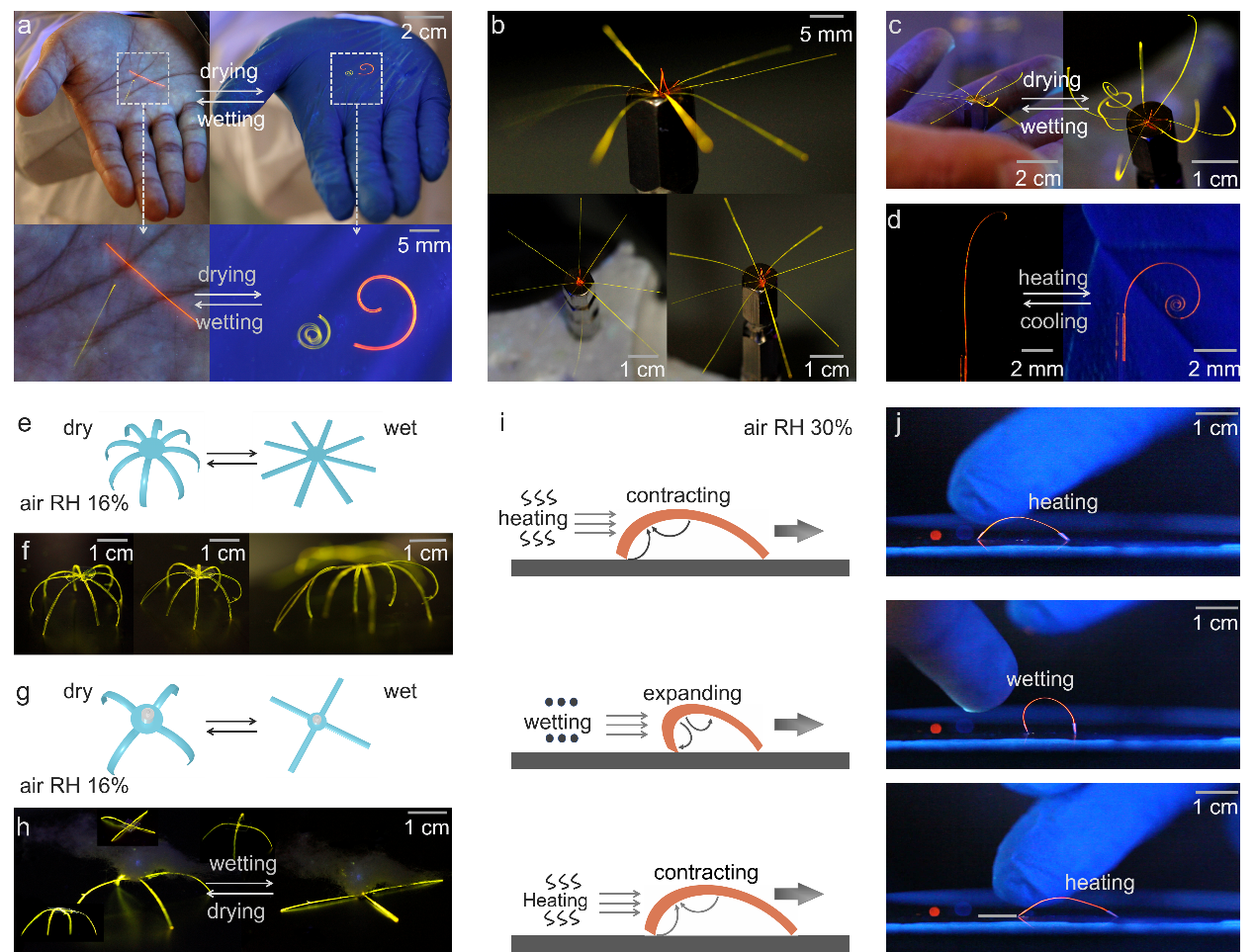
Figure 4. a Crystals of P2//2,3 straighten when they are placed on a bare palm and bend when they are placed on a nitrile glove due to response to variation in humidity. b A model inflorescence made of PDDA/PSS//2 and crystal 3. c An artificial model inflorescence of rain lily (Z. grandiflora) prepared from P2//2 and crystal 3. d A model of a plant tendril made of P2//3 which can curl by change in temperature. e, f Schematic diagram (e) and photographs (f) of a soft robot capable of performing a spider-like motion. g,h Schematic diagram (g) and photographs (h) of a soft gripper made of P2//1. i Schematic representation of the mechanism of ‘walking’ of an organic polymer-crystal hybrid materials across a surface induced by periodic change in aerial humidity. j Snapshots of the ‘walking’ of a hybrid crystal of P2//3.
We developed a hybrid material that can bend in response to changes in temperature and humidity. By combining polymers and flexible organic crystals, we were able to simulate the movements of living organisms, such as plant inflorescences and tendrils. This material has potential applications in flexible devices, soft robotics, and bionics.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026
Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in