From Coils to Crawls: A Snake-Inspired Soft Robot for Multimodal Locomotion and Grasping
Published in Bioengineering & Biotechnology and Materials

In the realm of robotics, nature has always been a rich source of inspiration. From the swift movements of cheetahs to the precise flight of birds, animals have inspired the design of robots that can perform tasks with remarkable efficiency and adaptability. Among these natural wonders, snakes stand out for their incredible versatility in locomotion and ability to handle prey. Their ability to navigate diverse environments and manipulate objects with their coiling bodies has captivated researchers for years. Now, under the guidance of Professor Qingyu Peng and Professor Xiaodong He from Harbin Institute of Technology University, a team of researchers from Harbin Institute of Technology has taken this inspiration to new heights by developing a snake-inspired soft robot with an initial coiling structure (ICSBot) that can perform multimodal locomotion and grasping tasks. This innovative soft robot leverages the diverse locomotion modes of snakes to navigate complex environments and handle objects with high flexibility and adaptability.
Why the ICSBot Matters
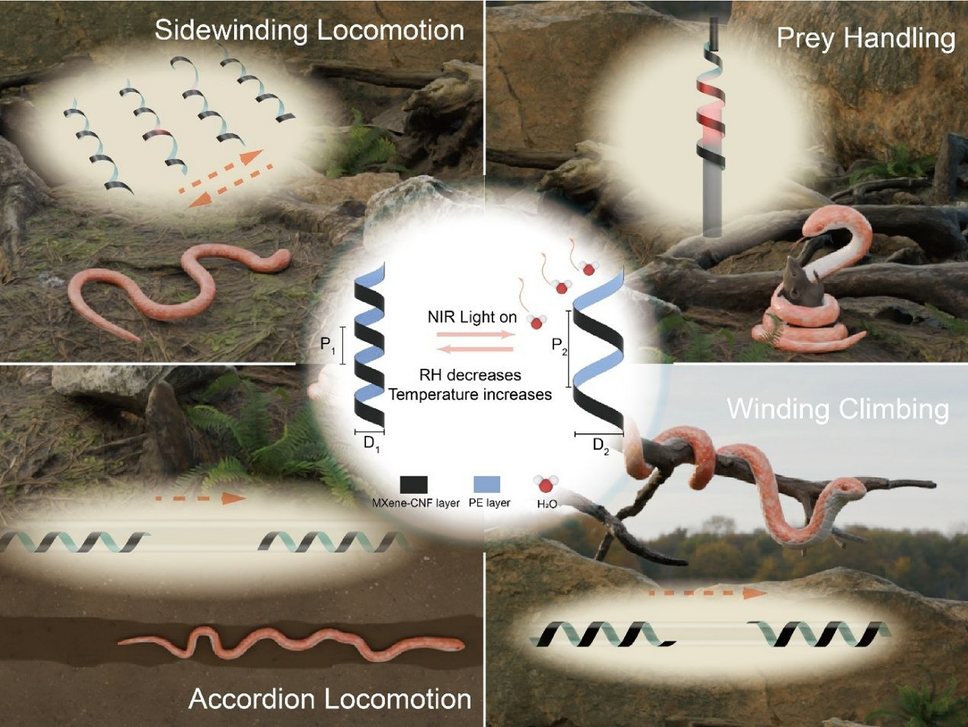
- Multimodal Locomotion: The ICSBot can perform sidewinding, accordion, and winding climbing locomotion, enabling it to navigate various terrains and confined spaces.
- Versatile Grasping: Inspired by snake prey handling, the ICSBot functions as a coiling gripper capable of grasping objects of different shapes and sizes with high precision and stability.
- Stimuli-Responsive: The robot responds to near-infrared (NIR) light, humidity, and temperature changes, offering versatile control options for different applications.
Innovative Design and Mechanisms
- Initial Coiling Structure: The ICSBot is fabricated using direct ink writing (DIW) technology to print MXene-cellulose nanofiber (CNF) ink onto pre-expanded polyethylene (PE) film. The initial coiling structure is predicted through theoretical calculations and finite element analysis (FEA), allowing for precise control over the robot's initial shape and deformation behavior.
- MXene-CNF Ink: The ink combines the photothermal conversion properties of MXene with the mechanical strength of CNF, enabling efficient energy conversion and structural stability. The MXene-CNF layer exhibits strong absorption in the NIR range, converting light energy into heat to drive the robot's deformation.
- Anisotropic Thermal Expansion: The PE film's anisotropic thermal expansion properties contribute to the robot's coiling and uncoiling movements. When heated, the PE layer expands, while the MXene-CNF layer contracts due to moisture desorption, causing the robot to uncoil. Conversely, when cooled, the PE layer contracts, and the MXene-CNF layer absorbs moisture, leading to coiling.
Applications and Future Outlook
- Robotic Gripping: The ICSBot's coiling gripper can grasp and manipulate objects in confined spaces, such as narrow tubes, with high precision and stability. This capability is particularly useful for tasks in tight environments where traditional grippers may struggle.
- Exploration and Rescue: The multimodal locomotion of the ICSBot allows it to navigate unstructured environments, making it suitable for exploration and rescue missions in challenging terrains, such as disaster sites or narrow passages.
- Medical Applications: The soft and flexible nature of the ICSBot, combined with its precise control and adaptability, holds potential for medical applications, such as minimally invasive surgeries or targeted drug delivery.
Future work may focus on further optimizing the ICSBot's design for enhanced performance, exploring additional stimuli-responsive materials, and integrating advanced sensors and control systems to improve its autonomy and adaptability. The development of the ICSBot represents a significant step forward in the field of soft robotics, offering new possibilities for creating versatile and adaptive robotic systems inspired by nature.
Stay tuned for more groundbreaking advancements from the research team at Harbin Institute of Technology as they continue to explore innovative solutions in soft robotics and biomimetics!
Editor of Nano-Micro Letters, which is an Open-Access, peer-reviewed journal reported papers that have at least one dimension ranging from a few sub-nanometers to a few hundreds of micrometers. The journal is published by Springer Nature and indexed by SCI, EI, SCOPUS, Pubmed, etc. The 2025 JCR Impact Factor is 38.5. The 2025 CiteScore is 58.9.
Follow the Topic
-
Nano-Micro Letters
Nano-Micro Letters is a peer-reviewed, international, interdisciplinary and open-access journal that focus on science, experiments, engineering, technologies and applications of nano- or microscale structure and system in physics, chemistry, biology, material science, and pharmacy.




Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in