Integrating Physics and Topology in Neural Networks for Learning Rigid Body Dynamics
Published in Computational Sciences

How to teach a neural network how a teapot tumbles and collides across a table?
In our recent Nature Communications article, we set out to answer that question by combining physics, geometry, and machine learning into a model called HOPNet. The idea was simple: instead of letting a model learn collision dynamics purely from data (i.e., observations), what if we guided it with physics?
Why Physics-Informed Learning?
Modern machine learning can be incredibly powerful, but it often ignores what we already know about the world. Physics-informed learning flips that perspective: instead of treating everything as a black box, it embeds physical laws or structure directly into the model. This can make models more efficient, more general, and less reliant on massive datasets.
Traditional simulators require all environment parameters to be precisely defined—from material density to surface roughness—and are only as good as the equations behind them. Physics-informed machine learning attempts to bridge this gap: it hard-codes what we know, and learns the rest from data. It is a flexible way to handle complex, real-world dynamics.

Modeling as the Key
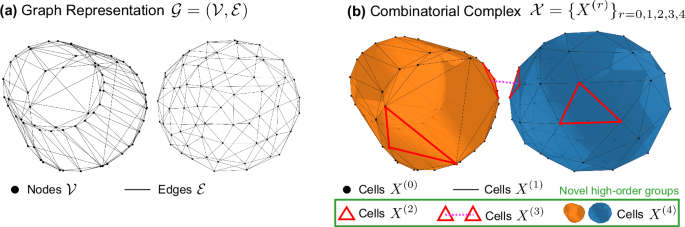
The key questions was: what should the model actually reason about? Many methods treat objects as collections of particles or surface triangles, but real collisions happen between surfaces and propagate through entire objects. That led us to group mesh faces, entire objects, and collisions into topological structures—used as the building blocks of our model.
With that in place, we designed message-passing updates that mimicked Newtonian mechanics—modeling how objects free-fall or collide. The network architecture followed naturally from the physics, rather than physics being forced in a general-purpose model.

Challenges and Implementation
The main challenge was translating physical intuition into a usable architecture. Defining how mesh faces, objects, and collision groups should interact took several iterations. We had to strike a balance between following physical principles and giving the model flexibility to learn complex effects like friction and contact dynamics.
From an implementation standpoint, existing ML libraries aren’t built for dynamic spatiotemporal graphs, especially with dynamic connectivity. We built custom logic for grouping, updating edges, and keeping rollouts efficient. There’s still room to optimize collision grouping, and we're exploring better libraries to improve speed and scalability.
Rollout example of our model (more examples here)
Learnings and Takeaways
One takeaway is that structuring the network around physics matters. By using our physics-informed architecture instead of a generic message-passing, HOPNet was more accurate, stable, and data-efficient. It also generalized better to unseen shapes—even high-resolution 3D scans it had never seen before.
More broadly, we realized you do not always need full-blown equations to embed physics in a machine-learning model. Just using physical intuition—like which parts of an object collide and how forces propagate—can go a long way in building more grounded models.
Future and Promising Directions
We are now exploring how to learn directly from video—reconstructing mesh geometry and dynamics end-to-end. We also want to expand into new physics domains: fluids, soft-body dynamics, or any setting where geometry and forces interact in complex ways.
Our hope is that this project inspires others to explore how even simple physical insights can ground and guide machine learning models—and adds to the broader effort of using AI to accelerate scientific understanding.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Biosensing
Publishing Model: Hybrid
Deadline: Sep 30, 2026

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in