Parametric excited pendula: which differences?

In 2010, Professor A. Luongo, inspired by previous studies with Prof. A.P. Seyranian et al., drafted handwritten notes outlining a promising idea in nonlinear dynamics. However, like many good ideas, these notes were forgotten over time, tucked away in a drawer. It wasn't until 2022 that fate intervened, leading Luongo to rediscover his forgotten musings with the help of researcher A. Casalotti, sparking the research detailed in this study. The revival of the original idea wasn't a simple event but rather a methodological process requiring time, dedication, and a deep understanding of physics and mathematics. Luongo and Casalotti's research focused on comparing two distinct methods of exciting a pendulum: one using sinusoidal excitation at the pivot point akin to a click-clak toy, and the other with a fixed pivot and variable length resembling a flying-cage machine.
Despite superficial similarities, these methods induced fundamentally different responses due to variations in parametric excitation and the Coriolis force. What made their work compelling wasn't just the discovery of surprising results but the process of understanding behind it. The core of their approach lay in perturbing a defective linear differential operator, a concept involving eigenvectors and eigenvalues. This abstract notion served as the cornerstone for their analysis. For the click-clak model, fractional power series were crucial due to the perturbation lying outside the operator's range, making it highly sensitive to external influences. Conversely, the flying-cage model required a different treatment, benefiting from perturbations within the operator's range, enhancing its stability against fluctuations.
Their study wasn't about rehashing existing knowledge but rather enriching it with fresh insights, explanations, and perspectives. Each model was meticulously examined, dissected, and analyzed to reveal its essence. The 2023 publication marked not just the culmination of years of research but an invitation to explore beyond established boundaries. Luongo and Casalotti paved the way to a world where mathematics and physics intertwined, uncovering nature's secrets. Their work, far from concluded, signaled the beginning of a journey into the unknown, inspiring generations of scientists and researchers to come.
A detailed description of the study is given in the follow.
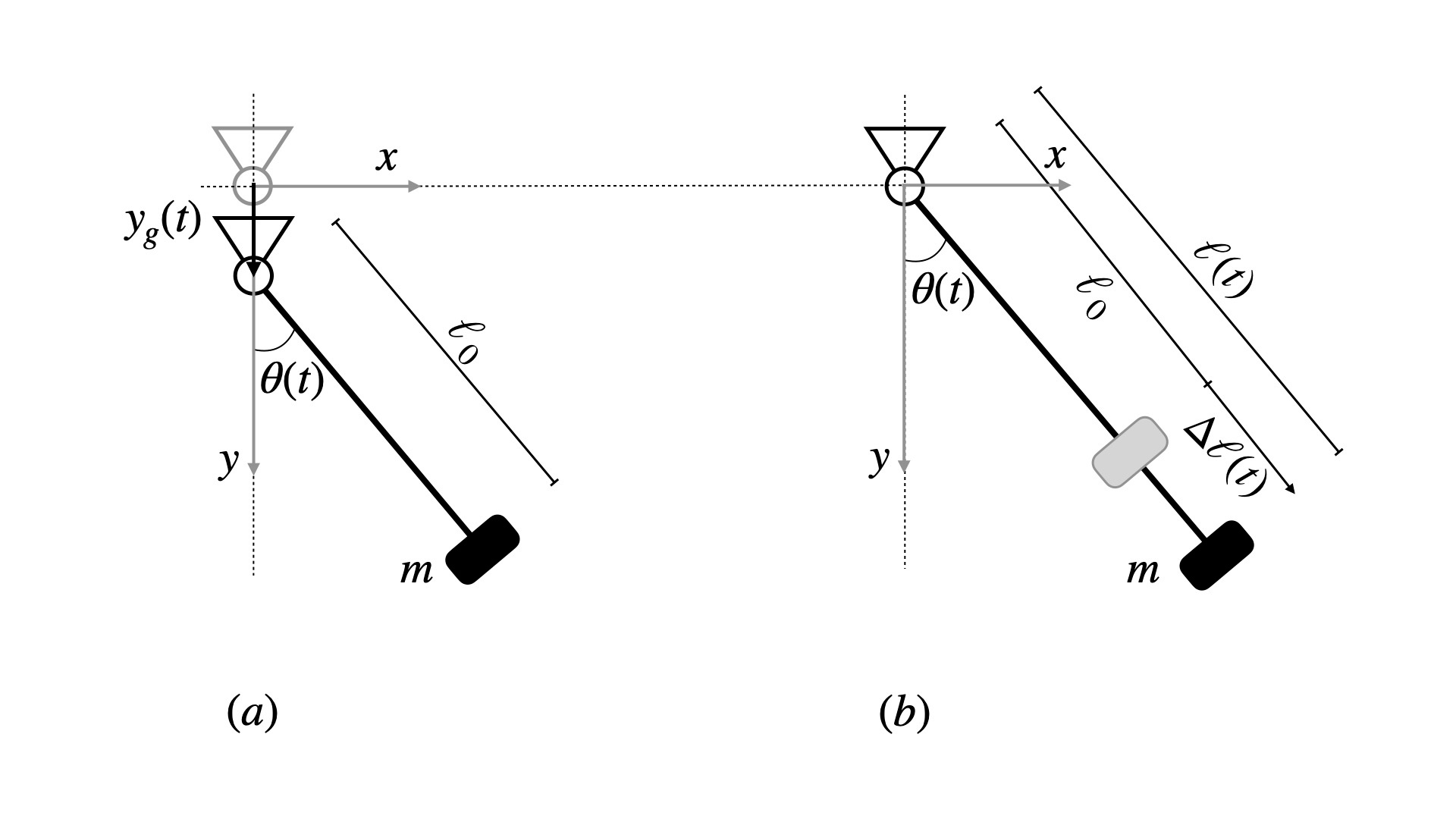
There exist two basically different way to excite a pendulum: (i) by enforcing a sinusoidal motion at the pivot (as in the click-clak system), or (ii) by letting the mass to move harmonically along the thread (as in the flying-cage machine). They are deeply different. While, indeed, the parametric excitation merely induces a ‘change of gravity’ in model (i), it affects, in addition, the tangential acceleration and triggers a Coriolis force in model (ii). As a surprising result, while model (i) can be more easily excited at high parametric frequency (indeed, you fast shake your hand to play click-clak balls), model (ii) is more easily excited at low frequency (indeed, you slowly move your legs while swinging). Such results were known in literature [Wright, J.A., Bartuccelli, M., Gentile, G., J. Math. Anal. Appl. 449(2), 1684–1707 (2017)], but we did a different ‘mathematical explanation’ here [A. Luongo, A. Casalotti, Nonlinear Dyn 2023, https://doi.org/10.1007/s11071-023-09112-3]. The approach is based on a perturbation of a defective linear differential operator (admitting, i..e, an incomplete set of eigenvectors associated to a double zero eigenvalue). Namely, while model (i) calls for using fractional power series (since the perturbation does not belong to the range of the operator), thus resulting to be high-sensitive to perturbations, model (ii) requires (since the perturbations are in the range), thus being less sensitive.
Professor of Solid and Structural Mechanics. University of L'Aquila, Italy
Area of interest:
Nonlinear Dynamics
Stability and Bifurcation
Perturbation Methods
Follow the Topic

Related Collections
With Collections, you can get published faster and increase your visibility.
Computational Methods and Time Series Analysis
Publishing Model: Hybrid
Deadline: Ongoing
Mechanical Systems and Structures
Publishing Model: Hybrid
Deadline: Ongoing
Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in