Personalized magnetic tentacles for targeted photothermal cancer therapy in peripheral lungs
Published in Electrical & Electronic Engineering

Introduction
Lung cancer, the leading cause of cancer-related deaths worldwide, poses a significant challenge in terms of both diagnosis and treatment. The mortality rate associated with this disease necessitates the development of non-invasive and scalable methods for early detection and therapy. While surgical intervention is the current standard of care for early-stage non-small cell lung cancer, it is highly invasive and may not be suitable for all patients. Moreover, the removal of a large portion of lung tissue can potentially impact lung function. This has prompted the urgent need for alternative, less invasive approaches to achieve early diagnosis and treatment.
The Challenge of Lung Cancer Diagnosis
Traditional access to lung cancer is often required for diagnosis (e.g. tissue biopsy) or therapy. This can be performed percutaneously using rigid needles or using a semi-rigid endoscope (bronchoscope) and specialized tools, to navigate through the bronchial tree. While using a bronchoscope (bronchoscopy) offers certain advantages, such as avoiding pleural membrane puncture, its limited reach due to the size of the bronchoscope restricts access to deeper anatomical regions. To overcome this limitation, Electro-Magnetic Navigation (EMN) techniques have been employed, allowing surgeons to navigate within the bronchial tree based on preoperative CT scans, and leveraging intra-operative fluoroscopy. However, the rigidity, size, and pre-bent shape of EMN tools often hinder accurate targeting of tumors due to poor conformation to deformed anatomy.
Given their inability to conform to the anatomy and having no control over their shape, rigid passive tools used in EMN may fail in navigating to the target location.

Magnetic Catheters: Shaping the Future of Navigation
Active shape forming allows easier targeting and reduced anatomical displacement. The latter can lead to mistargeting of the tumor. Several actuation approaches could be used to actively conform to the anatomy, such as cable-driven, pneumatic, magnetic etc.
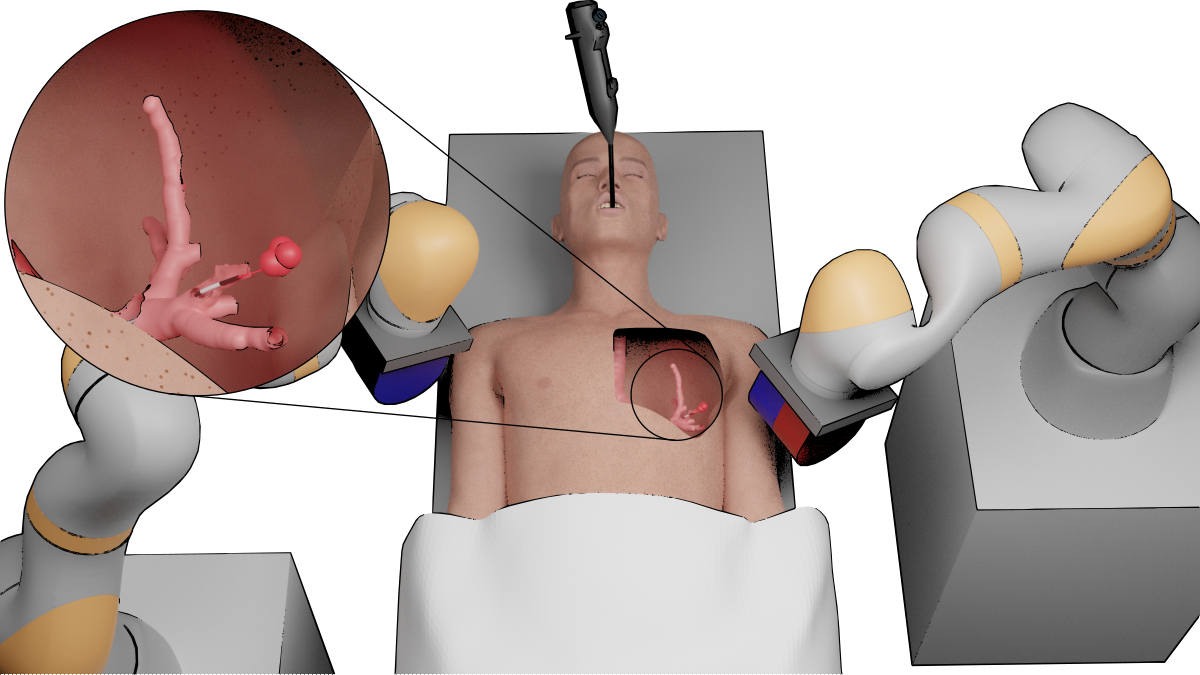
Among these approaches, magnetic actuation holds promise due to its remote-control capabilities, reducing the need for proximal mechanical and pneumatic connections and allowing for miniaturization. Magnetic catheters, powered by appropriate magnetic fields, can achieve high dexterity, significantly improving shape forming and enabling non-disruptive navigation within the anatomy. Our work poses groundbreaking innovations in this area, thanks to the development of magnetic tentacles, which are anatomy-specific fully magnetic catheters. These catheters possess three distinct advantages: (i) they are tailored to specific anatomical structures and guaranteed to succeed through pre-operative planning; (ii) they are miniaturized, with a diameter of only 2.4 mm; and (iii) they are softer than the surrounding anatomy, enabling full-shape control through magnetics.
Unlike tip-driven catheters that rely on functional contact, magnetic tentacles facilitate shaping along their entire length. This unique feature eliminates the need for tissue interaction during introduction, enabling follow-the-leader motion. By leveraging magnetic actuation and real-time shape sensing, magnetic tentacles offer a transformative approach to navigation inside the anatomy. The precise shaping capabilities and non-disruptive nature of these catheters hold the potential to revolutionize the field, providing improved diagnostic accuracy and treatment outcomes for patients.

Targeted Cancer Treatment and Enhanced Precision: Future of Therapy
In the future of cancer treatment, precision and effectiveness are key. Recent advancements in medical technology offer promising possibilities for targeted therapies and enhanced precision. Magnetic tentacles for non-disruptive navigation and plasmonic gold nanoparticles are two exciting areas driving innovation.
Magnetic tentacles provide a transformative approach and, thanks to their follow-the-leader style navigation, can bring curative aid where most needed.
Plasmonic gold nanoparticles have the remarkable ability to absorb laser energy at specific wavelengths. By attaching tumor-specific markers, they can precisely target cancer cells while sparing healthy tissue. This targeted approach shows promise for increasing treatment efficacy and reducing side effects.
As laser light tends to weaken as it travels through tissue, necessitating the illumination source to be in close proximity to the tumor. This is why the combination of magnetic tentacles and gold nanoparticles is crucial in shaping the future of lung cancer therapy.
This future vision holds tremendous potential: by combining non-disruptive navigation, precise shaping capabilities, and targeted therapies, we can enhance diagnostic accuracy and revolutionize cancer care. Continued research and innovation will drive us closer to a world where patients can receive effective and minimally invasive treatments, bringing hope to millions of lives affected by cancer.
Outlook
Magnetic catheters can revolutionize lung cancer diagnosis and treatment. These miniaturized, fully shape-controllable tools offer precise navigation capabilities, improving diagnostic accuracy and treatment outcomes. The future holds promise for this non-invasive and patient-specific approach, ensuring effective therapy for lung cancer patients. As research continues to push the boundaries of magnetic catheter technology, we anticipate further advancements in the field, ultimately transforming the landscape of lung cancer management.
In terms of next steps, we aim at evaluating our robotic platform in more realistic experimental models that include typical motions (e.g. respiration, heart beating, etc.) occurring during a bronchoscopy. If successful, this will complement our pre-clinical evidence and speed up the pathway to translation.
Follow the Topic
-
Communications Engineering
A selective open access journal from Nature Portfolio publishing high-quality research, reviews and commentary in all areas of engineering.

Related Collections
With Collections, you can get published faster and increase your visibility.
Generative AI for mechanical engineering design and optimization
Publishing Model: Open Access
Deadline: Dec 31, 2026
Engineering Solutions in Wind Energy Systems: Design, Efficiency, and Sustainability
Publishing Model: Open Access
Deadline: Sep 30, 2026



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in