Untethered flight of an insect-sized flapping-wing microscale aerial vehicle
Published in Electrical & Electronic Engineering

Sub-gram hovering vehicles have attracted increasing interest in recent years, in part for their predicted high maneuverability and ability to navigate confined unstructured spaces. In this regime, electromagnetic motors become very inefficient, so piezoelectric actuators are often used instead. These actuators are oscillatory, like muscles, which makes them well suited for flapping wings. However, they operate at several hundred volts, which makes integrating on-board power and electronics quite challenging at such a low mass. Such vehicles have thus remained tethered to off-board power supplies and control systems.
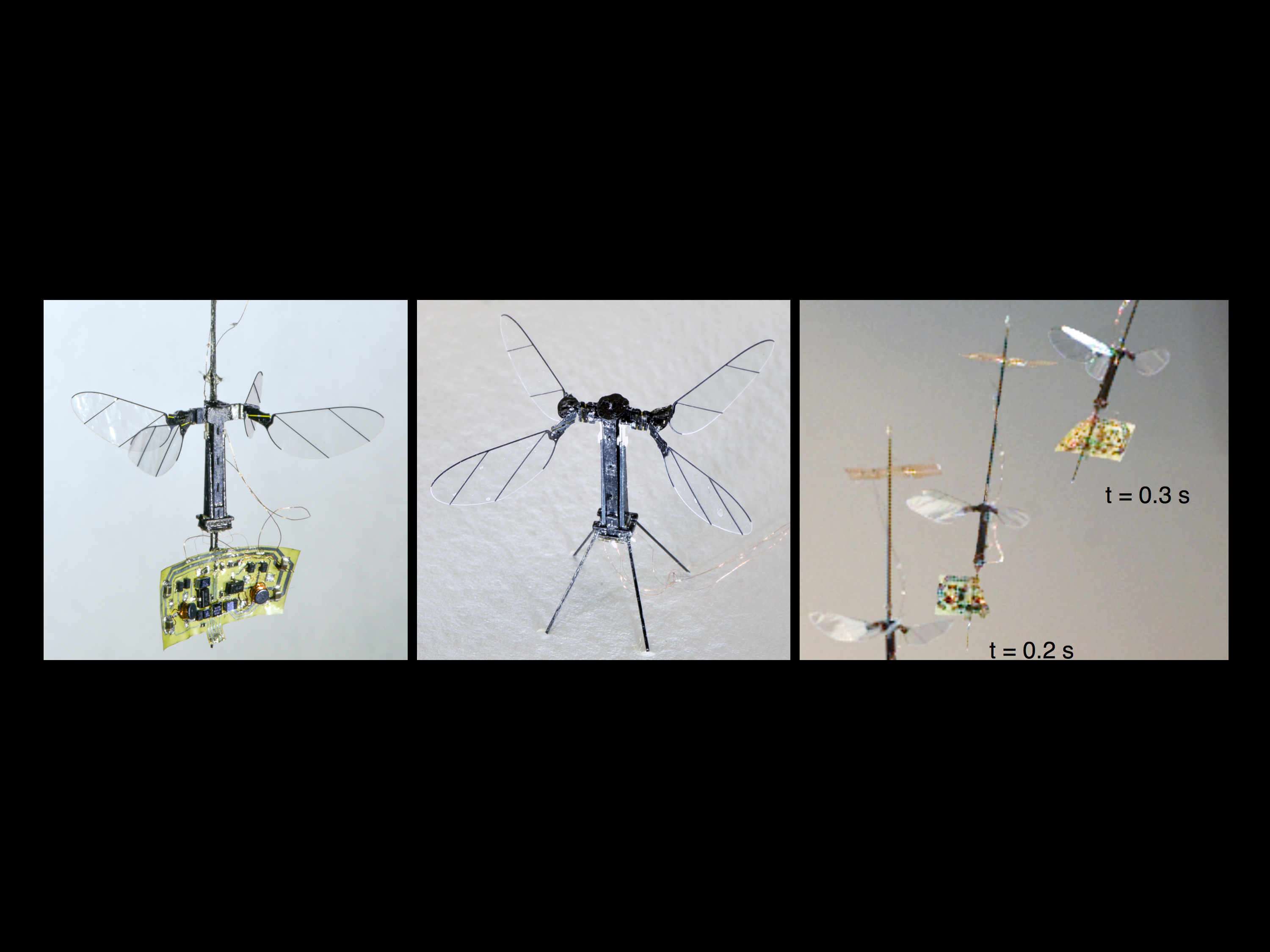
In our most recent work (click ‘Read the paper’ to view our article, or click here for a full-text, view-only version), we describe how we overcame these challenges to create the first insect-scale (mass < 1 g and wingspan < 5 cm) vehicle that can fly with its own power supply (several images depicting the vehicle and its operation are shown below, as well as a video summary of our work).
This work represents the culmination of over a decade’s worth of research performed by dozens of people. One of the first major developments in this research area came in 2008, when Rob Wood developed the first insect-scale vehicle that was able to successfully achieve liftoff (with external power) (Wood). In subsequent years, advances in the manufacturing process and studies of the aerodynamic effects of flapping wings enabled the design of the Harvard RoboBee. This 80 mg vehicle, unveiled in 2013 by Kevin Ma and Pakpong Chirarattanon (Ma, Chirarattananon, Fuller, and Wood), demonstrated the first controlled flight of an insect-scale vehicle. In addition to controlled flight, the vehicle was a platform through which the lab developed new control strategies to perch on surfaces, fly through wind gusts, and swim underwater. However, with a payload capacity of only 40 mg, on-board power and control remained out of reach (the vehicle needed to be tethered to a large external power and control system for all of these tests).
Then, in 2016, improvements in the flapping kinematics efficiency, actuator performance, and wing shape led to a doubling of the lift to 270 mg and a quadrupling of the payload to 160 mg without changing the weight or size of the vehicle, and only requiring 40% more power (Jafferis, Graule, and Wood). Given this new payload capacity, untethered flight now seemed within our grasp, and we began the process of miniaturizing the electrical system to efficiently generate the drive signals at low mass. Our final electrical system weighed 91 mg and consumed about 115 mW of power while powering the vehicle. Since the remaining payload was six times less than the weight of the smallest commercially available battery, we turned to 10-mg solar cells as a promising alternative.
However, after months of optimizing the drive signal, improving efficiency, and minimizing weight, we found that the system just wasn’t quite good enough to fly without using very high light intensities about six times greater than peak natural sunlight (at which point the vehicle would start to degrade from the heat of the lamps). So we had to come up with new ways to increase the payload of the vehicle without correspondingly increasing the power demand. This involved determining and overcoming the factors that were limiting our ability to increase lift (it was the epoxy bond strength in the piezoelectric actuators), realizing that switching from two wings to four would increase aerodynamic efficiency by up to 30% because we could flap the wings more slowly to achieve the same lift, and changing the time-varying voltages used to flap the wings to optimize the efficiency of the drive electronics.
The result is our new RoboBee X-Wing, a 90 mg four-wing vehicle with a peak lift of 370 mg and a peak payload of 245 mg. Combining this vehicle together with extremely lightweight power circuits fabricated in house and 60 mg of high efficiency solar cells resulted in a 259 mg integrated system that achieved untethered flight at about three ‘suns’. The vehicle is capable of carrying about 70 mg of additional payload for sensors, control electronics, or a larger power supply in future tests.
This is a monumental achievement for insect-scale flight, and represents an important milestone for achieving autonomy and enabling operation outside of the laboratory environment. The vehicle’s piezoelectric ‘muscles’ now exceed the typical lift-to-muscle mass ratio of living insects (66 N/kg), and the entire integrated system matches bees’ lift per input power (2-2.5 g/W). By pushing the limits of efficiency and power density, both for the electronics and the physical mechanism, we enable not only future applications of insect size and weight flying robots, but also myriad other weight and power constrained micro systems such as minimally-invasive surgical tools, wearable electronics, and space applications.
by Noah Thomas Jafferis and E. Farrell Helbling


 under the peak-lift operating condition.")
Follow the Topic
-
Nature
A weekly international journal publishing the finest peer-reviewed research in all fields of science and technology on the basis of its originality, importance, interdisciplinary interest, timeliness, accessibility, elegance and surprising conclusions.

Related Collections
With Collections, you can get published faster and increase your visibility.
Carbon Dioxide Removal
Publishing Model: Hybrid
Deadline: Jan 16, 2027




Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in