A Reconfigurable Omnidirectional Triboelectric Whisker Sensor Array for Versatile Human–Machine–Environment Interaction
Published in Materials
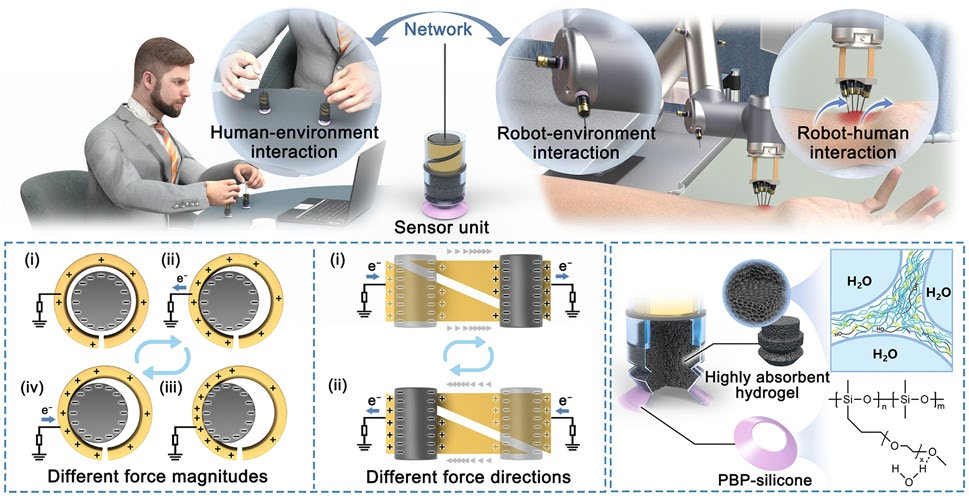
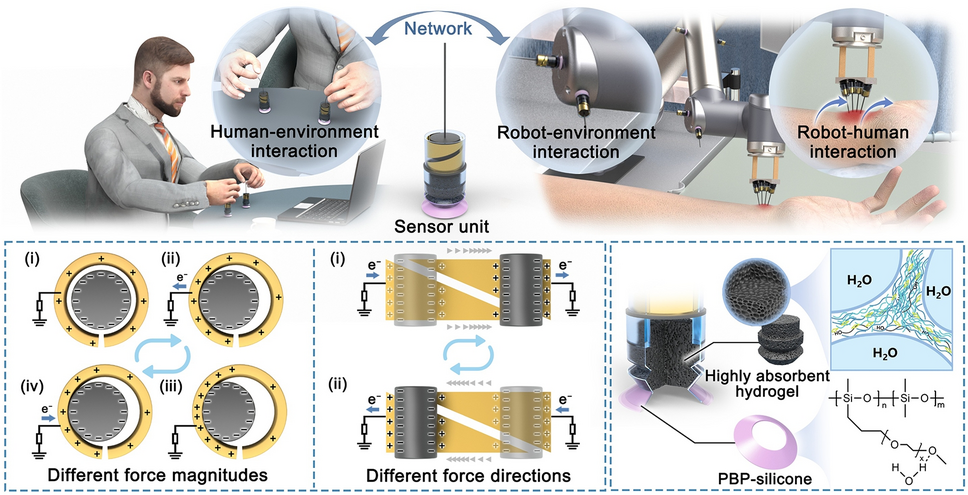
As tactile perception becomes essential for next-generation intelligent robots and interactive systems, developing versatile and adaptive force-sensing interfaces is increasingly important. A research team led by Prof. Hongya Geng, Prof. Wenbo Ding and Prof. Juntian Qu reports a reconfigurable omnidirectional triboelectric whisker sensor array (RO-TWSA) that enables multidirectional force sensing, portable deployment, and adaptive interaction across complex environments. Integrating a triboelectric whisker structure (TWS) with a hydro-sealing vacuum sucker (UHSVS), the system overcomes long-standing challenges in tactile adaptability, anchoring versatility, and unit-level reconfigurability.
Why an Omnidirectional Reconfigurable Sensor Matters
- Limitations of existing tactile systems
Conventional tactile sensors lack unit mobility, cannot conform to curved or soft surfaces, and often detect only single-axis forces, requiring multiple electrodes for full-field sensing.
- Limitations of existing attachment mechanisms
Dry adhesives, microspines, electrostatic patches, and traditional vacuum cups involve trade-offs in compactness, surface compatibility, or external actuation.
- RO-TWSA advantage
By combining omnidirectional sensing with an untethered hydro-sealing suction mechanism, the RO-TWSA achieves portable, reconfigurable, and environment-adaptive tactile perception.
Key Structural Innovations
- Hydro-Sealing Vacuum Sucker (UHSVS)
The UHSVS generates a water-sealed negative-pressure chamber using a hydrogel and hydrophilic PBP-silicone ring, enabling strong, reversible adhesion over 200 cycles without external water.
- MXene-Enhanced Triboelectric Whisker Structure
The dual-triangular electrode design and MXene-doped silicone improve open-circuit voltage by 2.05×, enabling high sensitivity with minimal electrode count.
- High-precision Omnidirectional Sensing
The whisker detects forces down to 0.024 N and resolves angular changes as small as 5°, validated by experiments and simulations.
- Durability and Environmental Robustness
Stable performance is maintained after 50,000 cycles and under 95% humidity, demonstrating excellent long-term reliability.
Demonstrated Applications and Future Prospects
- Robotic tele-palpation and remote sensing
The RO-TWSA captures subtle force variations for remote robotic diagnostics and manipulation tasks.
- Surface texture perception
Real-time voltage mapping and confusion-matrix classification enable resolution-adjustable texture recognition.
- Autonomous environmental exploration
Mounted on mobile robots, the system supports tactile obstacle detection and boundary reconstruction.
- Future development
The reconfigurable architecture, strong anchoring capability, and high-resolution multidirectional sensing provide a scalable platform for next-generation wearable electronics, field robotics, spatial mapping, and human–machine–environment adaptive interfaces. The authors highlight opportunities to extend the system toward multi-sensor fusion, intelligent robotic skins, and real-world environmental interaction.
Editor of Nano-Micro Letters, which is an Open-Access, peer-reviewed journal reported papers that have at least one dimension ranging from a few sub-nanometers to a few hundreds of micrometers. The journal is published by Springer Nature and indexed by SCI, EI, SCOPUS, Pubmed, etc. The 2024 JCR Impact Factor is 36.3. The 2024 CiteScore is 53.1.
Follow the Topic
-
Nano-Micro Letters

Nano-Micro Letters is a peer-reviewed, international, interdisciplinary and open-access journal that focus on science, experiments, engineering, technologies and applications of nano- or microscale structure and system in physics, chemistry, biology, material science, and pharmacy.





Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in