A Wireless Controlled Robotic Insect with Ultrafast Untethered Running Speeds
Published in Electrical & Electronic Engineering

Insects with high agility in nature can achieve high-speed linear locomotion and quick turns of small radius to prey or avoid risks. Inspired by these biological machines, insect-scale legged microrobots (dimensions less than 5 cm) have been proposed by roboticists and demonstrate excellent tethered locomotion performance using external power sources and control electronics. Considering that the tethered movements are highly restricted in confined space and real application scenarios often require high untethered mobility, a variety of untethered microrobots integrated with onboard power sources, control units, and task loads have been developed further based on their tethered configurations. However, severe performance degradation occurs after these microrobots carry necessary payloads, which becomes a bottleneck for microrobots to achieve high untethered locomotion performance. In our recent work, a 2-cm wireless controlled robotic insect “BHMbot” (1.5 cm by 2.0 cm, 1.76 g) is proposed and demonstrate ultrafast untethered running speed and turning agility comparable to that of real insects after integrating with power and control units.

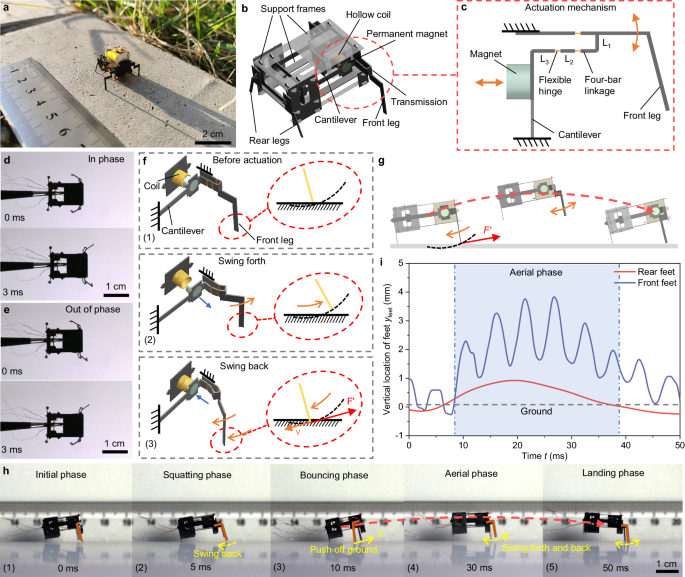
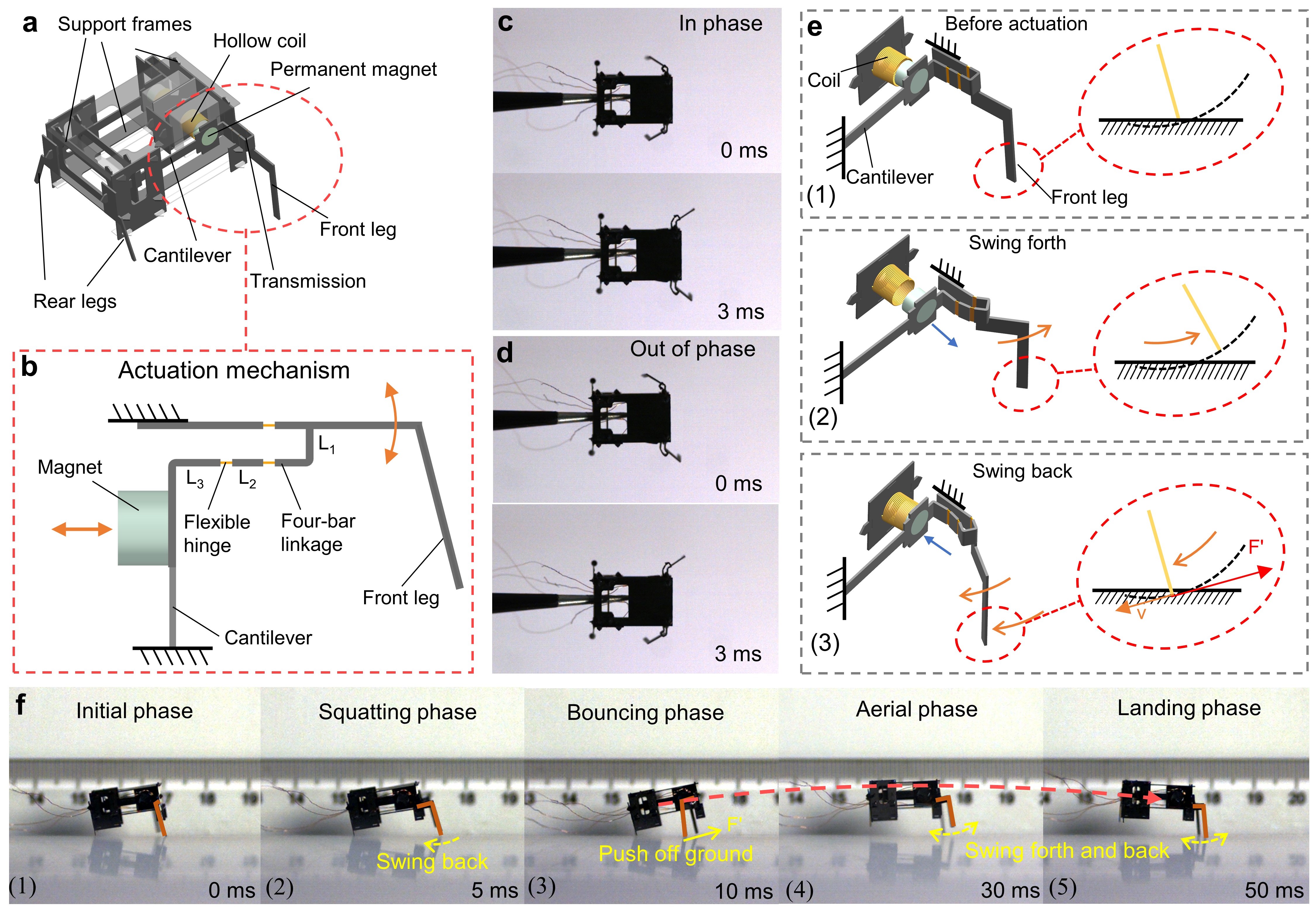
The tethered BHMbot consists of two electromagnetic actuators, two transmission linkages which integrate two front legs separately, and a pair of rear legs which are fixed to the support frames. The linear electromagnetic actuator outputs vibratory motions, which are transformed into the swing motions of the front legs through the transmission. To achieve the desired swing motions of the front legs, they are intentionally designed to be longer than the rear legs to form an upward tilt angle θ0 of the body. Due to the tilt angle θ0, the front legs encounter resistance from the ground during their backward swing motions. In response, the front legs push off the ground, generating an obliquely upward force F′. Consequently, the BHMbot gains an obliquely upward momentum, allowing it to bounce off the ground and then land on the ground in a way similar to the locomotion pattern observed in several running mammals. The videos captured by a high-speed camera demonstrates that the forward movement of the BHMbot is exactly composed of a series of continuous bouncing cycles, and one bouncing cycle consists of five typical phases: initial phase, squatting phase, bouncing phase, aerial phase and landing phase.
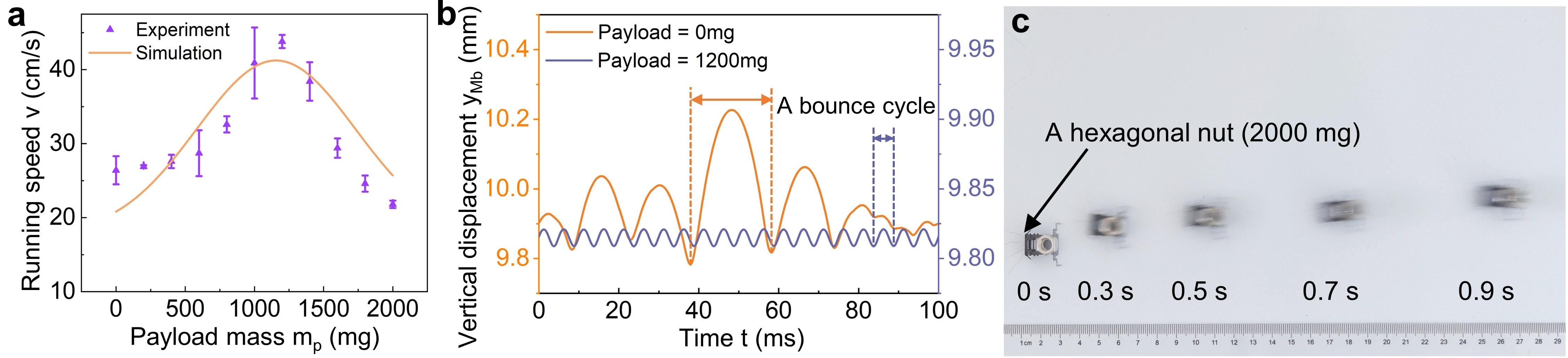
The high untethered mobility of the BHMbot is attributed to the complementary combination of bouncing length and high bouncing frequency after carrying payloads. Differing from the existing microrobots, both experiments and simulation results indicate that the running speed of the tethered BHMbot versus payload mass increases firstly and then declines, and the mass corresponding to the maximum speed is defined as mop. The inner mechanism resulting in the variation tendency is revealed based on experiments and dynamic simulations. The initial increase of the running speed is attributed to the dominant increase in bounce frequency when the payload mass increases from zero to mop. However, when the payload mass continues to grow, the increase of bounce frequency is unable to counter the decrease of bounce length, which leads to a decrease of the running speed. Benefiting from the characteristic, the optimized BHMbot demonstrate the maximum running speed of 25 BL/s after carrying a payload of 2.0 g (5.5 times its own weight).
To realize high controllability under the limitation of the insect size, we propose a control strategy based on the actuation frequency difference between two front legs. Utilizing the control strategy, both direction and trajectory control can be achieved through two independent actuators. To demonstrate untethered controlled locomotion, a miniaturized power and control circuit is developed (600 mg, 2.0 cm by 1.0 cm) based on the control strategy. After integrating with the battery and the circuit, the untethered BHMbot can achieve complicated locomotion trajectories by combining several basic movements, such as circles, rectangles and capitals. By sending real-time commands, the untethered BHMbot can also move along an irregular path to avoid barriers. Especially, the untethered BHMbot also demonstrates an ultrafast untethered relative running speed at 17.5 BL/s and a turning centripetal acceleration at 65.4 BL/s2, which even exceeds the performance of several insects with similar sizes.
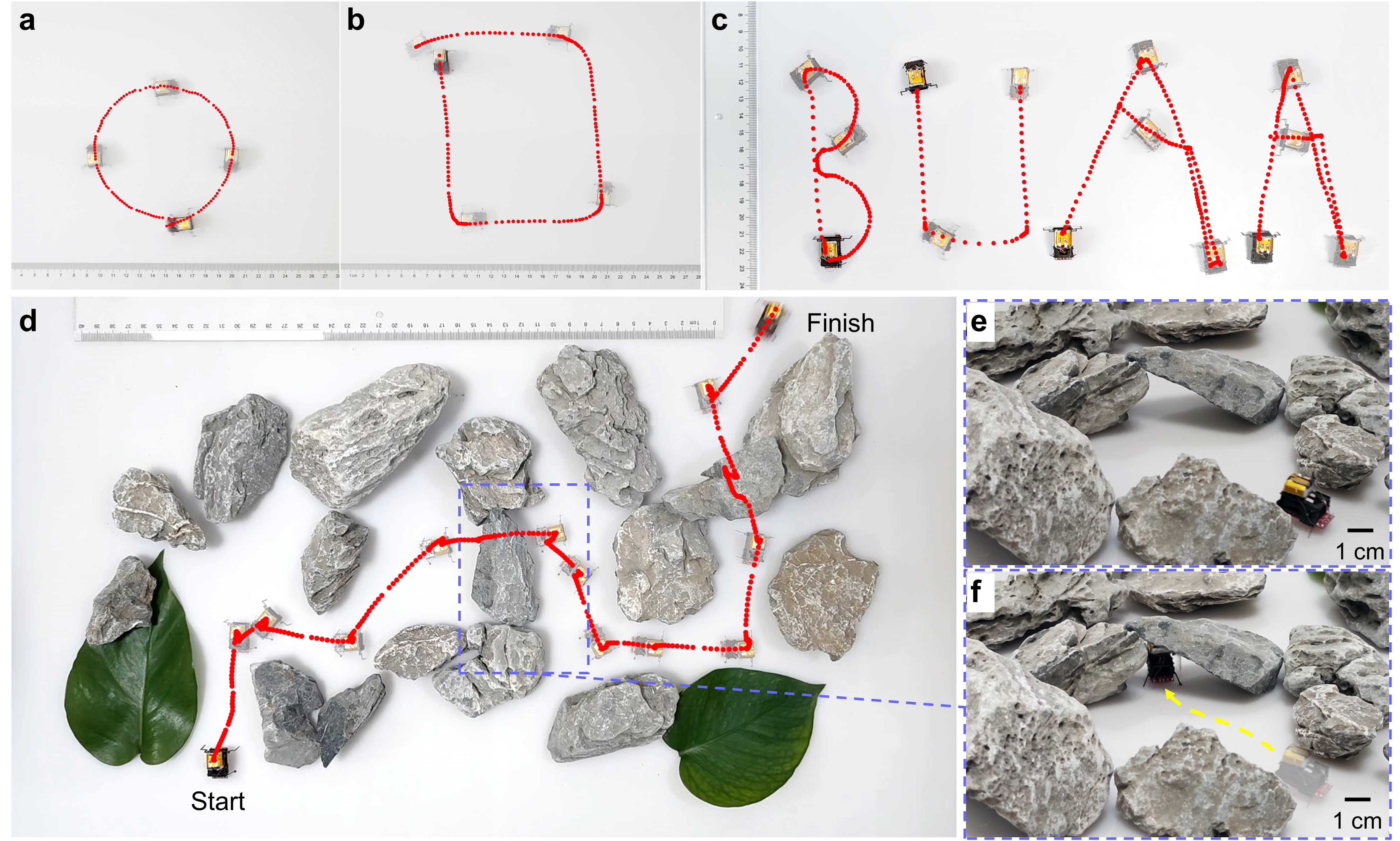
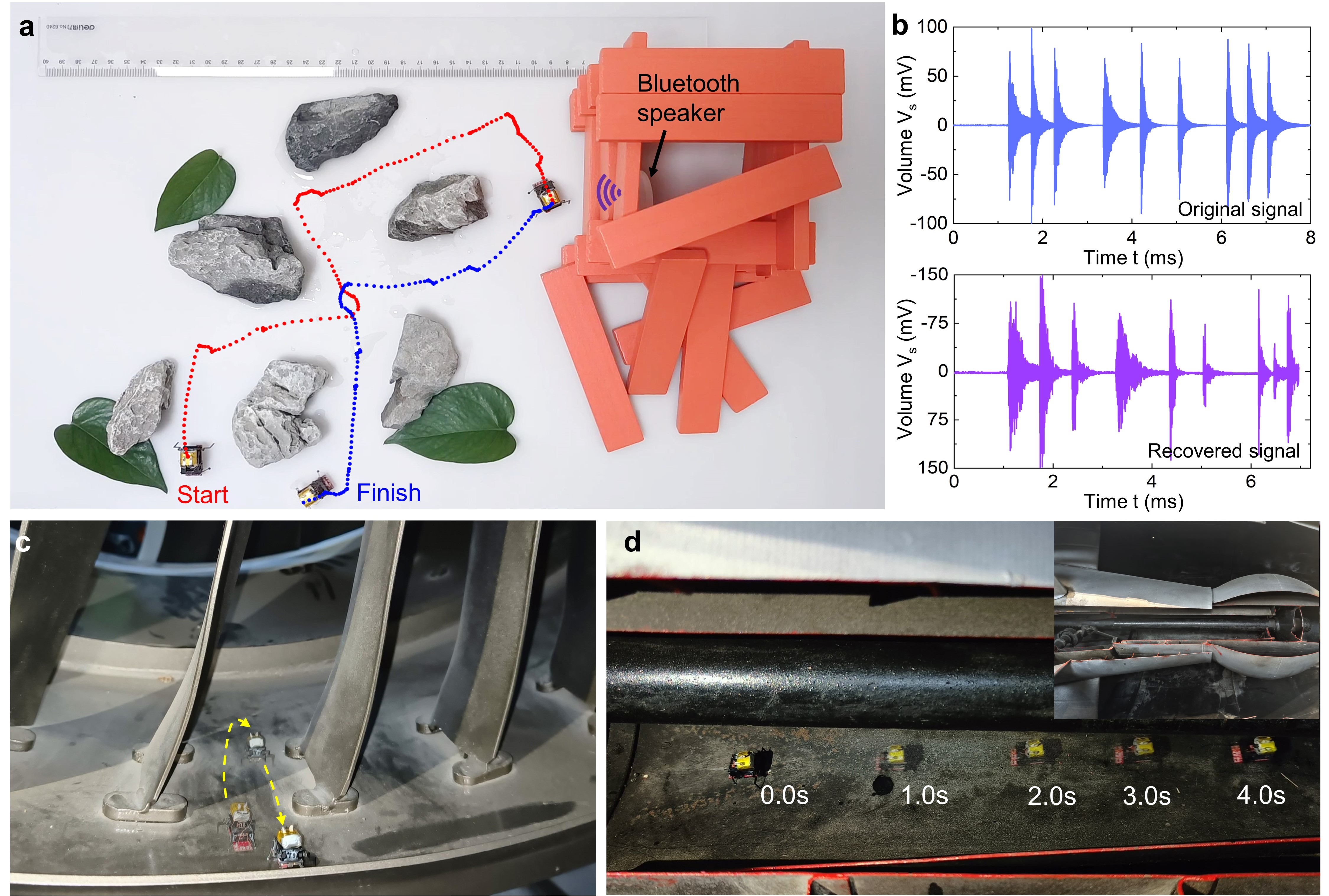
Aided by the mini size and high mobility, the BHMbot can go through narrow spaces and reach specified locations to execute special tasks. Via a commercial MEMS microphone (60 mg), the BHMbot successfully collect SOS sound signals of a Bluetooth speaker buried by building blocks. The sound data is then transmitted to a computer and converted to real sound. The BHMbot can also goes through the narrow passage between two stator blades of a civil turbofan engine and the tailbone of a turbojet engine. Benefiting from the development of micro cameras at millimeter scale, it is promising for the BHMbot to integrate with a micro camera to capture internal images of aero engines in the future.
For more details, you can find the full paper here: https://www.nature.com/articles/s41467-024-47812-5
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in