Autonomous perching on a branch by an ornithopter
Published in Electrical & Electronic Engineering

The flapping-wing robot flight has been actively pursued by researchers recently, observing the research outputs of scientific groups and also the flight videos of the robots in outdoor environments. The majority of the works used a radio control transmitter to control the flapping wing system by a pilot on the ground. The closed-loop control of the flight has been a challenge for flapping wings since the precise position and orientation of the robot during the outdoor flight are hard to be measured. Oscillation of the robot during the flapping phase constantly changes the orientation and perturbs the system. The big indoor facility of the GRVC provided the option of using a motion capture system to have precise feedback on the robot. This research presented the results of closed-loop control and perching of the robot on a branch, for the first time for this size of the flapping wing robot (1.5m wing span), please see Figure 1.
The GRIFFIN ERC Advanced Grant commenced on Nov. 2018 [1]. The design and development took almost 2 years to obtain a platform that could carry a 500g payload while the weight of the robot was almost the same [2]. Moving forward from manual flight to closed-loop control was an important and difficult step to fulfilling any further tasks. Without the controlled flight the robot cannot keep a trajectory tracking or reach a waypoint. Evidently, the robot needs to reach a predefined position to perch. Then integration of many subsystems led to perching on a branch. The subsystems are the robot itself, the feedback, active leg and claw and flight controller.
The active-leg system must regulate the claw alongside the branch while closing the perching point. This was done through an additional line sensor to detect the branch and command the leg to move. The mechanical design of the claw should bear the impact force and hold the robot steady on the branch. All these concerns push the system to be minimum weight, around 700g, with the active leg-claw add-on. More details could be traced by reading the published paper in Nature Communications [3] (click here to see the paper).
The remaining milestones of the GRIFFIN focus more on outdoor activities such as controlled flight, trajectory tracking in large-scale monitoring activities, perching, etc. We hope to perch soon on a real branch among the trees, see Figure 2 which shows the robot placed on a branch.
In the end, the authors would like to thank all GRVC members who helped us during these years on the GRIFFIN project, and specifically, on this paper.
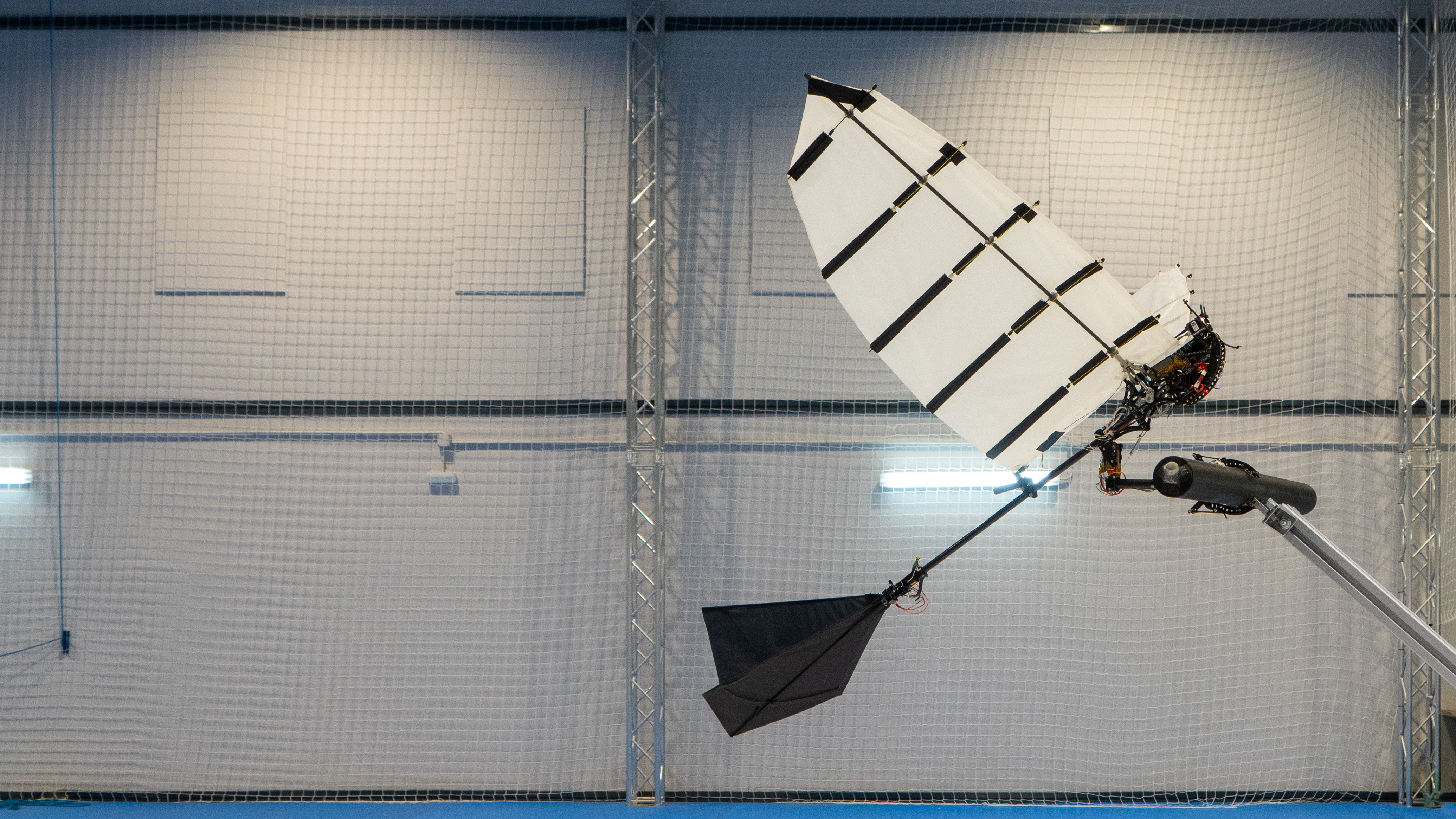
Figure 1. The robot bird perched on the branch.

Figure 2. The robot bird is placed on an outdoor branch.
More videos and details could be seen in the supplementary material of the paper (please click here).
References
[1] Permanent-URL(b), "https://griffin-erc-advanced-grant.eu/."
[2] R. Zufferey, J. Tormo-Barbero, M. M. Guzmán, F. J. Maldonado, E. Sanchez-Laulhe, P. Grau, et al., "Design of the high-payload flapping wing robot E-Flap," IEEE Robotics and Automation Letters, vol. 6, pp. 3097-3104, 2021.
[3] R. Zufferey, J. Tormo-Barbero, D. Feliu-Talegón, S. R. Nekoo, J. Á. Acosta, and A. Ollero, "How ornithopters can perch autonomously on a branch," Nature Communications, vol. 13, pp. 1-11, 2022.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in