Bioinspired handheld time-share driven robot with expandable DoFs
Published in Bioengineering & Biotechnology
Background
For minimally invasive flexible surgery, where natural orifices are leveraged to minimize damage and shorten recovery time, surgeons envision an ideal surgical tool that combines passive flexibility to navigate tortuous anatomical structures and active steerability for operating at a distal target. However, two paradoxes arise: a slender tube cannot simultaneously be soft for tissue protection and rigid for force exertion, and its motion cannot be both passively flexible for propagation and actively controllable for operation.
Biologically Inspiration
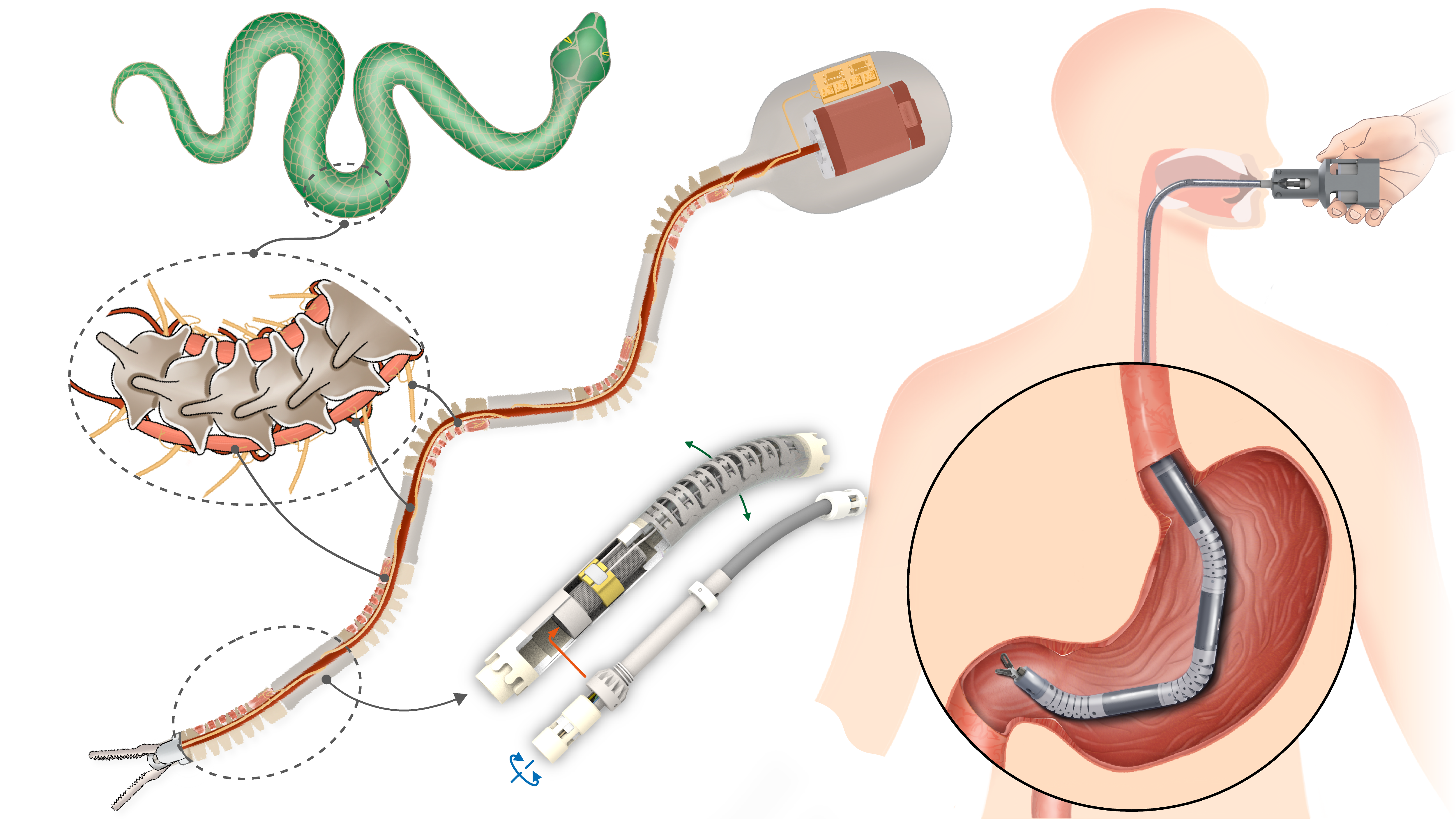
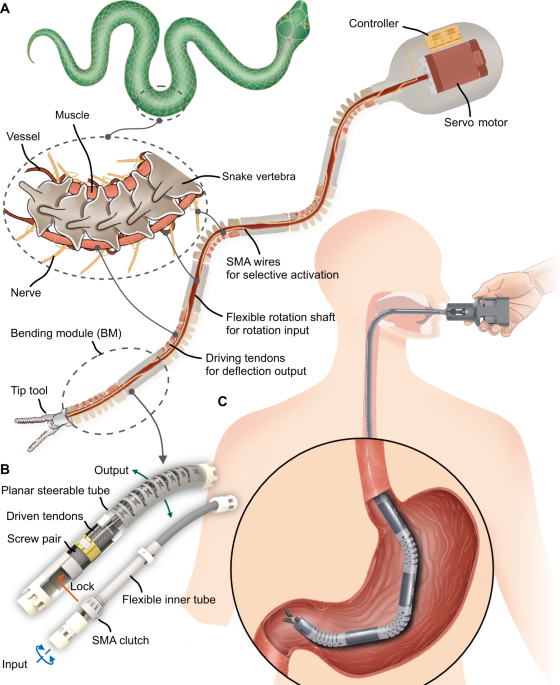
The snake displays remarkable flexibility in its slender shape, but replicating its flexible motion abilities directly in robots proves costly, with substantial increases in material costs, control complexity, and overall robot sizes. We have discovered that the unique locomotion abilities of the snake stem from their serially chained multiple segmental spines. Additionally, hundreds of vertebrae are activated by the spinal cord, which traverses the vertebral canal, branching spinal nerves at every level to connect muscle fibers. Simultaneously, the muscles in sequential segments are nourished by the only major distributing artery, which carries blood pumped from the heart, branching into successively smaller vessels that culminate as capillaries, supplying essential nutrients.
New Strategy
Motivated by the mechanism observed in snakes, where hundreds of vertebrae are activated by a singular spinal cord and nourished by the exclusive major distributing artery, our design integrates a flexible shaft nested inside another flexible hose to transmit a universal rotation. The flexible shaft is compliant to bending while remaining rigid to transmit axle rotation, thereby resolving the first paradox. The universal rotation then actuates numerous bending modules serially connected to the flexible shaft, offering expandable degrees of freedom (DoF) and effectively addressing the second paradox.
Overview
The handheld robot was elongated by a passive extension tube with a rotation shaft. Bending modules, each comprised of a flexible inner tube and a planar steerable tube, are sequentially attached to the passive extension tube. Flexible inner tubes are connected to the rotation shaft. A clutch, driven by Shape Memory Alloy (SMA), is designed and positioned in the interlayer between the flexible inner tube and the planar steerable tube. This clutch is responsible for transmitting the rotation input from the flexible inner tube to the bending output of the planar steerable tube. Based on time-share driven strategy, bending modules are actuated independently by a single motor.

Conclusion
In this work, inspired by the unique structure of the snake spine and the intricate nerve-muscle-vessel relationship in biology, we proposed a time-share driven mechanism. This mechanism leverages a single motor to activate multiple bending modules. Our approach is based on three fundamental principles – Universal Transmission, State Keeping, and Selective Response. We illustrated this concept through the design of a planar steerable tube, serving as the 'muscle,' a flexible inner tube representing the 'vessel,' and the utilization of a SMA clutch as the 'nerve' for activation. Collectively, we made a prototype consisting of only one motor and multiple bending modules that adhere to these principles. These bending modules can be fabricated with different motion ranges, assembled in multiple bending plane combinations, lengthened by passive extension tubes, and integrated with various tip instruments, which makes the robot customized and task-oriented. Consequently, this prototype embodies a lightweight, cost-effective, and multi-degree-of-freedom (DOF) robot. It can be handheld, navigates through confined spaces, and establishes a workspace over obstacles.
Acknowledgments
We extend our gratitude to Z. Zhang from Hangzhou Risheng Medical Technology Co., Ltd for providing advanced machining technology, H. Lu and J. Zhang from Hangzhou SKONSIN Health Co., Ltd. for supplying a customized endoscope. Special thanks to J. Jing from Zhejiang Provincial People’s Hospital for consultations regarding potential surgical applications. We also appreciate the Laboratory Animal Center of Zhejiang University for providing the standard animal experiment site and consultations.
Our Team
The Robot and Acoustic Imaging Technology Laboratory, affiliated with the State Key Laboratory of Fluid Power and Mechatronic Systems at the School of Mechanical Engineering, Zhejiang University, and the Institute of Manufacturing Technology and Equipment Automation, has been engaged in research on the theory and technology of ultrasonic non-destructive testing for many years. The laboratory's main research direction focuses on robot-assisted acoustic imaging detection technology, including various automated ultrasonic non-destructive testing, mobile railway inspection, intelligent underwater inspection, and robot-assisted medical ultrasound imaging. These cutting-edge studies span diverse fields such as advanced manufacturing, rail transit, energy pipelines, medical health, etc.
Led by Professor Keji Yang, the team comprises several nationally recognized young talents who have undertaken numerous high-tech research and development projects, including the National High Technology Research and Development Program (863 Program), the National Natural Science Foundation, and major science and technology projects in Zhejiang Province. They have received nearly 20 awards at the provincial and ministerial levels, published over 100 high-level SCI papers in journals such as NC, IEEE TIE, MSSP, APL, and developed automated ultrasonic non-destructive testing systems for steel plates, steel bars, and steel pipes, as well as full matrix ultrasound imaging systems and intelligent inspection systems for robots. These technologies have been widely adopted and served multiple leading intelligent equipment enterprises.

Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026
Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in