Cut boundary curvature guided shape-shifting kirigami sheets for raw egg yolk grasping and conformable heaters
Published in Electrical & Electronic Engineering

Designing shape-programming materials from 2D thin sheets to 3D shapes has attracted increasing interest in the past decades due to shape-imparted novel properties, which have found broad applications in soft robots, functional biomedical devices, and four-dimensional (4D) printing. Kirigami, an ancient paper cutting art, offers a promising strategy for 2D-to-3D shape morphing through cut-guided deformation. Existing kirigami designs for target 3D curved shapes rely on intricate cut patterns in thin sheets, making the inverse design and the control of the dynamic morphology challenging.
Motivated by the Gauss-Bonnet theorem in differential geometry, here, we exploit programming the curvature of cut boundaries rather than the complex cut patterns in kirigami sheets for target 3D curved shapes. The strategy largely simplifies the inverse design and the program of the dynamic morphology. Leveraging this strategy, we demonstrate its potential applications as a universal and nondestructive gripper for delicate objects, including live fish, raw egg yolk, and a human hair, as well as dynamically conformable heaters for human knees. This study opens a new avenue to encode boundary curvatures for shape-programing materials with potential applications in soft robotics and wearable devices.

Fig. 1: Shape shifting of 3D curved morphologies from 2D kirigami sheets with different cut boundary curvatures subject to uniaxial tension. a-c 2D precursors of three kirigami sheets patterned with parallel cuts but different boundary curvatures kbhighlighted in dashed white curves. circular (a), square (b), biconcave (c) samples with positive, zero, and negative boundary curvature, respectively. d-f The corresponding formed 3D curved shapes with different Gaussian curvature K. d Spheroidal shape with K > 0 at an applied strain of 0.30. e Cylindrical shape with K = 0 at an applied strain of 0.65. f Saddle shape with K < 0 at an applied strain of 1.47. Scale bars = 10 mm.
As shown in Fig. 1, our kirigami sheet is composed of parallel discrete ribbons enclosed by continuous boundaries through simple patterning of parallel cuts, which is different from the previous networked polygon cut units-based kirigami sheets. Setting the circular, square, and biconcave boundary provides a stretching-tuned mechanism of variation in the boundary curvature, which further changes the deployed Gaussian curvature. Simply stretching the kirigami sheet with prescribed curved cut boundaries could generate varieties of well-predicted 3D curved shapes with positive, negative, and zero Gaussian curvatures and their combinations. The simple design of parallel cuts in this work endows the unique characteristic, i.e., parallel cuts make each discrete ribbon a geodesic curve of the morphed morphologies. It will facilitate the inverse design and dynamically programming morphologies.

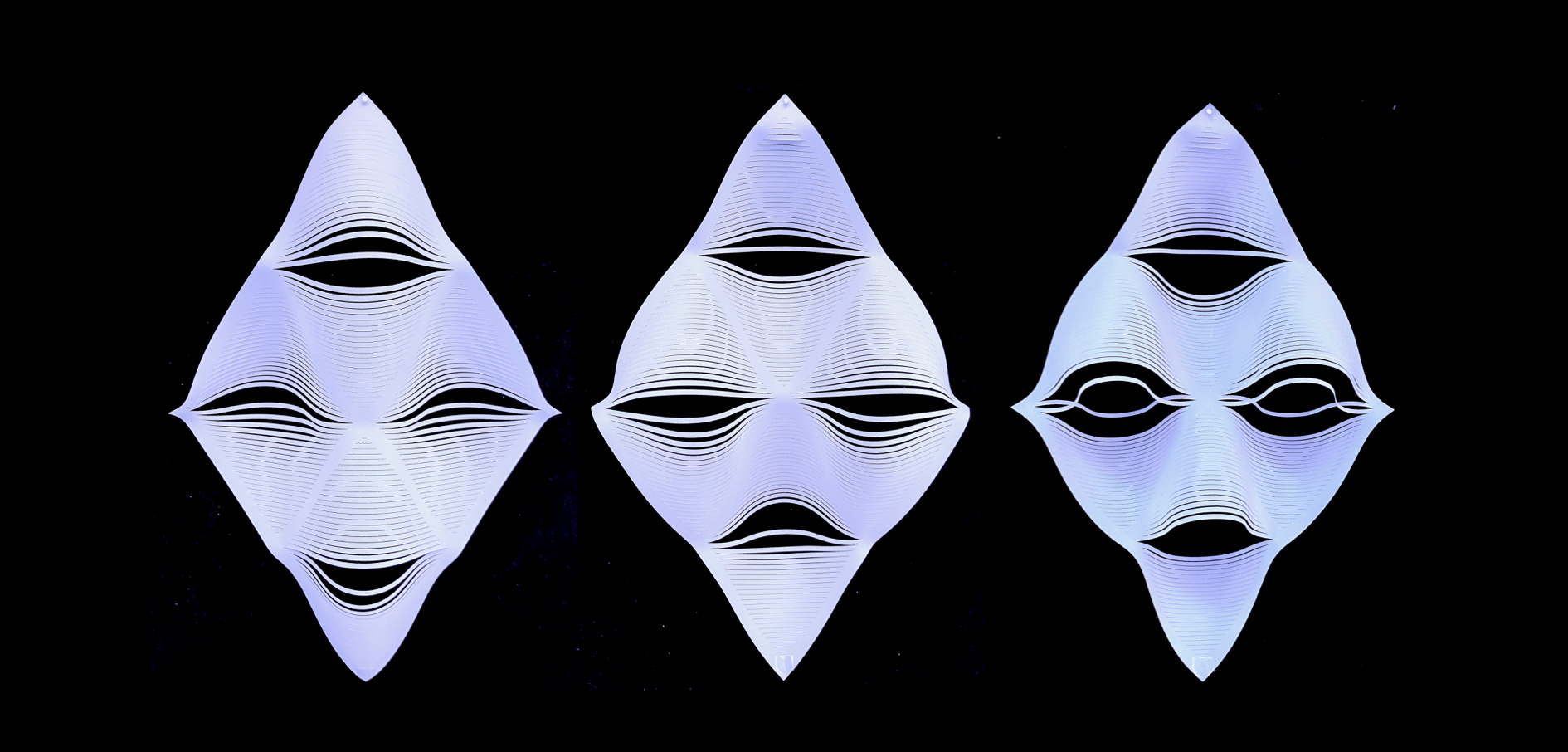
Fig. 2: a-c uni-axial stretching induced reconfigurable human face-like morphologies with switchable smiley (a) and sad (b) expressions, as well as eyeglasses (c) by tuning the popping directions of ribbons. d-e Encapsulating a live fish from a petri dish filled with water. f Front view of grasping a raw quail egg yolk. The inset shows the corresponding side view. g Front view of grasping a human hair. The inset shows the corresponding isometric view. Scale bars = 10 mm
Leveraging both the forward and inverse design strategy utilizing the boundary curvature, we demonstrate more complex 3D shapes combined with their dynamic morphologies. As shown in Fig. 2a-c, a diamond-shaped 2D precursor performs face changing via the bistability of the ribbons. Further, programming the dynamic morphology, we show a delicate and noninvasive gripper (Fig. 2d-e) for gelatinous organisms. It is noteworthy that using pinching or the friction force, existing kirigami grippers are not well suited for grasping gelatinous organisms. These grippers need to compress or pinch the targets to lift the targets, making the noninvasive collection of the delicate organisms challenging. Distinct from that, we demonstrated a grasping mode, encapsulating the targets ultra-gently without compressing the objects, via the programmable dynamic morphology. Moreover, the universal gripper can be applied to a wide range of targets, including small objects such as a raw egg yolk (Fig. 2f), a human hair (Fig. 2g), a thin micro-SD card, and blueberries, etc., as well as a 400g deadweight that is 1,000 times the weight of the gripper (0.4g).
Also, we harness the correlation between the boundary curvature and the 3D morphology and demonstrate an electrically driven resistive human-knee heater (Fig. 3) mimicking the conformability of the shrimp’s shell. It shows intrinsic adaptivity with decent conformability and large-area uniform- heating capability.
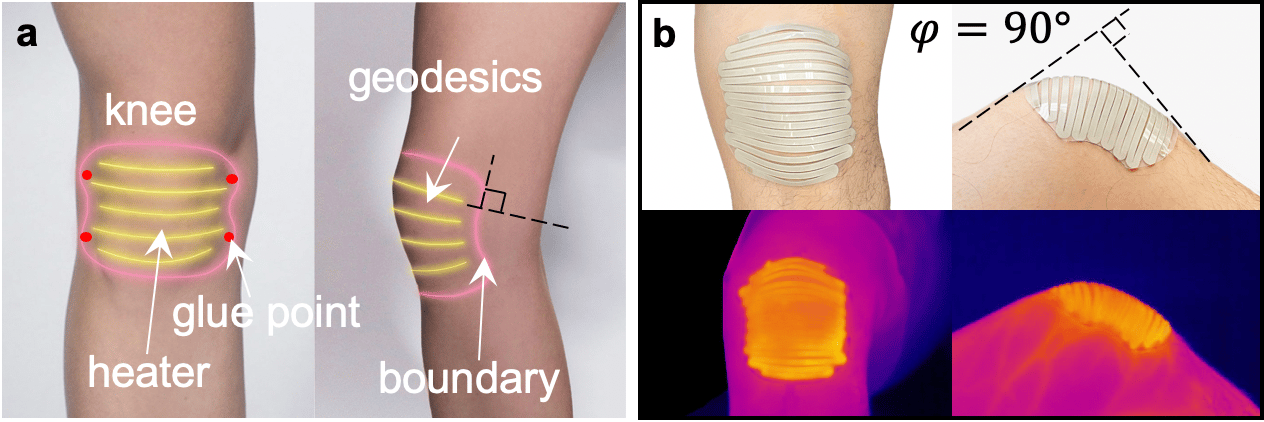
Fig. 3 Dynamically conformable heater. a Schematic of the heater attached to the knee. Pink and yellow lines are the boundary and the geodesics, respectively. Red dots are the points with the adhesive. Black dashed lines representing the geodesics are perpendicular to the boundary with the knee bending. b The kirigami heater deforms with the knee with the bending angle of the knee equal to 90o and the corresponding thermal image upon heating.
If you would like to know more about this study, please see the original manuscript:
https://doi.org/10.1038/s41467-022-28187-x
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026
Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in