Earthworm Inspired Soft Robot Locomotion
Published in Electrical & Electronic Engineering
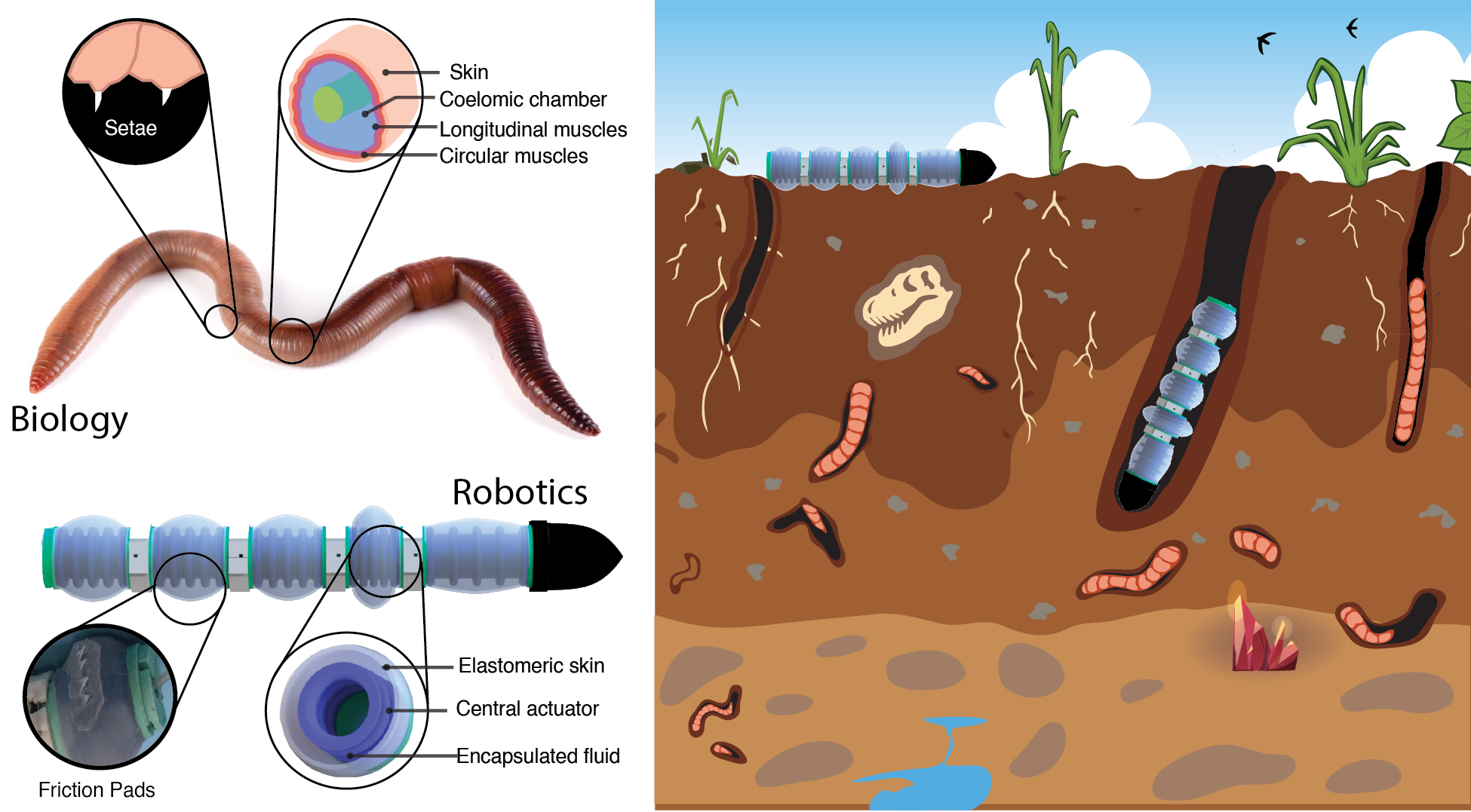

Innovation in soft robotics has reached new heights as scientists have created a bioinspired burrowing robot that mimics the mechanics of earthworms. The creation of this robot, designed to navigate subterranean environments, was made possible through a thorough understanding and application of earthworm locomotion mechanics.
The team developed a peristaltic soft actuator (PSA) that implements the antagonistic muscle movements of earthworms, using a single input channel to perform both elongation and compression. The PSA is a bidirectional soft actuator, demonstrating a maximum elongation of 10.97mm at 1 bar of pressure and a maximum compression of 11.13mm at 0.5 bar of pressure, unique in its ability to generate both longitudinal and radial forces in a single actuator module. The optimal volume for the PSA was found to be 50ml, with gel selected as the encapsulated fluid for its high radial force generation.
The team then connected five similar PSA modules in series using links to form the soft peristaltic robot. Initial experiments showed that the friction generated by the elastomer surface was insufficient to propel the robot on a planar surface, so small passive friction pads were inspired by earthworms' setae and attached to the ventral surface of the robot. The robot demonstrated improved locomotion with a speed of 1.35mm/s, surpassing the speed of 1.25mm/s shown by the elongation gait pattern. The setae had no effect in granular medium, but the combined gait pattern still recorded better performance both on the surface and at different depths. For constricted pipe crawling, both the elongation and combined gait patterns failed, but a unique multi-sequential gait pattern was developed using the bidirectional nature of the module, allowing the robot to locomote through a narrow pipe with an average velocity of 0.65mm/s.
This study not only proposes a new method for developing a peristaltic earthworm-like soft robot but also provides a deeper understanding of locomotion from a bioinspired perspective in different environments. The potential applications for this technology are vast, including underground exploration, excavation, search and rescue operations in subterranean environments and the exploration of other planets. This bioinspired burrowing soft robot is a significant step forward in the field of soft robotics and opens the door for further advancements in the future.
Follow the Topic
-
Scientific Reports
An open access journal publishing original research from across all areas of the natural sciences, psychology, medicine and engineering.

Related Collections
With Collections, you can get published faster and increase your visibility.
Infectious disease diagnostics
Publishing Model: Open Access
Deadline: Sep 23, 2026
AI in Education
Publishing Model: Open Access
Deadline: Oct 09, 2026





Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in