Electrically-driven phase transition actuators to power soft robot designs
Published in Bioengineering & Biotechnology, Electrical & Electronic Engineering, and Materials

In the quest for electrically-driven soft actuators, the focus has shifted away from liquid-gas phase transition, commonly associated with reduced strain rates and actuation delays, in favor of electrostatic and other electrothermal actuation methods.
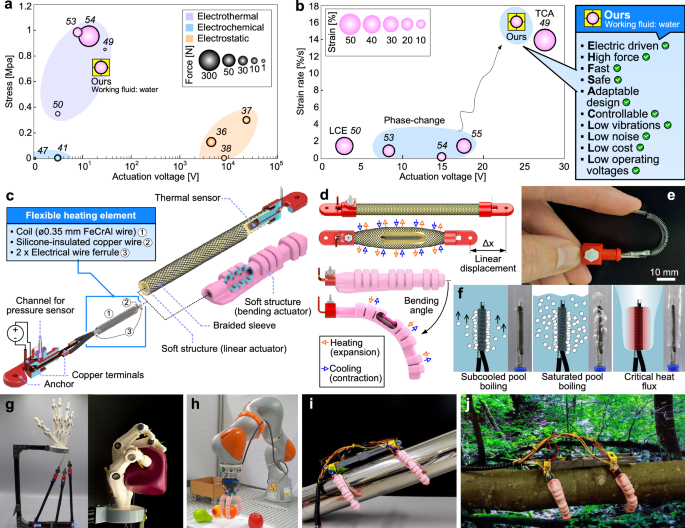
This prevented liquid-gas phase transition technology from capitalizing on its unique characteristics, particularly: low voltage operation, controllability, scalability, and ease of integration into robots. In this work, we introduce a liquid-gas phase transition electric soft actuator that uses water as the working fluid and is powered by a coil-type flexible heating element.
It achieves strain rates of over 16%/s and pressurization rates of 100 kPa/s. Blocked forces exceeding 50 N were achieved while operating at voltages up to 24V.
We propose a method for selecting working fluids which allows for application-specific optimization, together with a nonlinear control approach that reduces both parasitic vibrations and control lag. We argue that liquid-gas soft actuators offer a combination of performance and adaptability that should not be ignored and could potentially result in significant gains in systemwide efficiency.
We demonstrate the integration of this technology in soft robotic systems, including a cable-driven biomimetic hand and a quadruped robot powered by liquid-gas phase transition. An example of this can be seen in Bixo, which required an average of 50W of power across all actuators during its tube climbing task. Although this value is difficult to benchmark due to the unique nature of the robot, it is plausible to argue that it is within the same order of magnitude as what would be expected of a similarly sized non-soft robot, performing a similar task. This is a key contribution towards reaching the inflection point where soft robots become an enticing alternative to rigid robotic systems, moving them from the laboratory into our daily lives.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Biosensing
Publishing Model: Hybrid
Deadline: Sep 30, 2026
Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in
Supplementary materials: https://softrobotic.github.io/untapped_potential/