From Snails to Robots: Pioneering Adaptive Swarms in Rugged Environments
Published in Bioengineering & Biotechnology and Electrical & Electronic Engineering
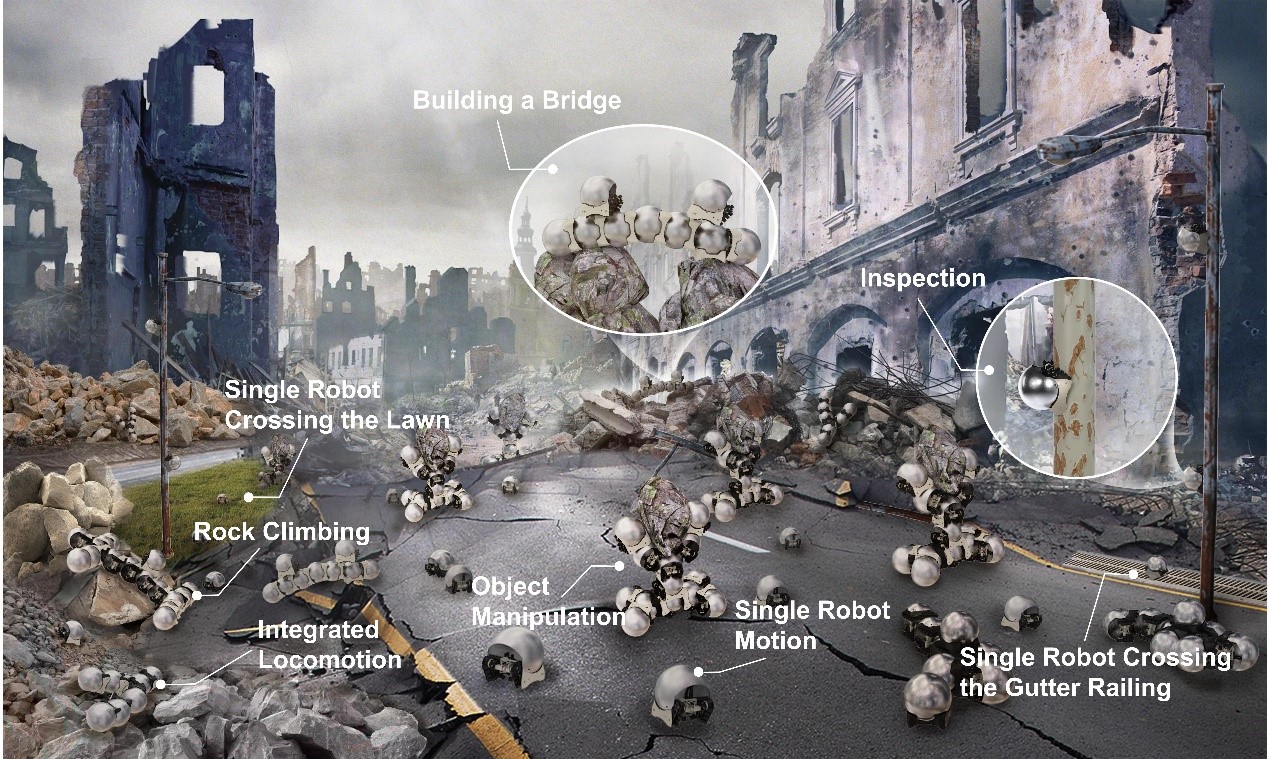

 Fig 1. A depiction of the snail robot swarms’ mission profile
Fig 1. A depiction of the snail robot swarms’ mission profile
Robot swarms are often inspired by the collective behaviors observed in nature, such as those seen in schools of fish, colonies of insects, and flocks of birds. These natural systems demonstrate remarkable abilities to perform complex tasks through coordinated efforts, a concept known as swarm intelligence. This intelligence enhances adaptability, robustness, and efficiency, crucial traits for survival in dynamic environments. Drawing on these principles, there has been a surge in the development of robotic swarms designed to mimic these natural phenomena across various environments, including air, water, and land. However, terrestrial robot swarms have primarily been confined to predictable, indoor environments, limiting their application in the real world. The challenge increases significantly when transitioning these systems to navigate the unpredictable and diverse conditions of outdoor terrains. Our research introduces an approach with a 3D modular self-reconfigurable robot swarm inspired by the unique attributes of land snails. This new system not only adapts to complex outdoor environments through enhanced individual mobility but also features a robust connection mechanism, ensuring high stability when the swarm assembles. This innovative leap bridges the gap between indoor precision and outdoor versatility, paving the way for broader applications of terrestrial robotic swarms, as shown in Fig 1.
Addressing the challenge of deploying a terrestrial robot swarm in outdoor environments, we focused on two primary design aspects. The first was to develop a robot with a versatile, freeform connector inspired by the adaptive capabilities of land snails, which are known for their ability to navigate complex terrains. Drawing from nature, where snails climb obstacles and attach to various surfaces, our robots mimic this with a spherical shell and a mobile "foot," enhancing their maneuverability and robustness. This design allows robots to attach to each other's ferromagnetic shells, forming larger, adaptable structures capable of complex tasks. The second challenge involved creating an efficient, stable connector. Traditional freeform robotic connectors often lack flexibility or robustness. To overcome this, our snail robots use a dual-mode connection mechanism that combines magnetic adhesion with a vacuum suction system. This hybrid approach allows for dynamic attachment anywhere on another robot's shell, with the vacuum suction enhancing the connection under stress. This innovative connector design ensures flexibility in positioning while maintaining the structural integrity of the swarm, crucial for effective function in diverse outdoor conditions.
 Fig 2. Task allocation in snail robot’s two modes
Fig 2. Task allocation in snail robot’s two modes
To effectively manage the diverse functionalities of a terrestrial robot swarm, we have identified six primary task categories: assembly/disassembly, self-reconfiguration, flow, manipulation, locomotion, and support, as shown in Fig 2. These tasks vary in their demands for mobility and connection strength, prompting the development of two distinct operational modes for our snail-inspired robots: free mode and strong mode. In free mode, the robots leverage differential tracks with embedded magnets to facilitate a free magnetic connection. This mode is capable of executing three primary actions—yaw, sliding, and transitioning between modules—making it suitable for tasks that require high adaptability and moderate connection strength, such as assembly/disassembly, self-reconfiguration, and flow. The magnetic connections allow for agile and smooth movements across the surfaces of other robots, enhancing the swarm's adaptability in dynamic environments. Strong mode, on the other hand, is utilized for tasks that demand higher structural stability and stronger connections. Here, the robots deploy a retractable vacuum suction cup, enhancing both vertical anti-torque and yaw drive torque. This mode is essential for supporting more demanding tasks like manipulation, locomotion, and support, where multiple robots might need to link together or form extended, cantilevered structures.
To validate the capabilities of our snail-inspired robot swarm, we conducted comprehensive field experiments assessing their operational flexibility and structural integrity under varied conditions. Each individual robot, equipped with caterpillar tracks, exhibited robust mobility across different surfaces, such as lawns and concrete, and effectively navigated minor obstacles like uneven stones and small gaps. Challenges arose with larger impediments, which individual units could not surpass alone. In collaborative experiments, the robots showcased their ability to overcome these limitations by forming strategic assemblies. For instance, a group of six robots successfully scaled a rock step 1.5 times their height by stacking and aligning to distribute weight and maintain stability. Additionally, when faced with uneven cobblestone paths, the robots formed a larger, three-legged structure, increasing stability and allowing them to traverse the difficult terrain. Another remarkable demonstration was their ability to form a cantilever bridge to cross a 30 cm wide trench, showcasing their potential in constructing useful structures in complex environments. Moreover, the robots were configured into manipulative arms for transferring objects and navigating vertical obstacles, highlighting their adaptability for task-specific configurations. These experiments illustrated that the snail robot swarm could adapt to a wide range of environmental challenges, significantly enhancing their application potential in real-world scenarios.
In conclusion, this study developed a snail robot swarm with a hybrid connection system through a biomimetic design approach, demonstrating the substantial value of biomimicry in robotics. This innovative system not only serves as a model for enhancing the stability and flexibility of freeform terrestrial robot swarms but also opens promising avenues for future research. These avenues include developing connection mechanisms and strategies inspired by additional elements of nature, broadening the scope of biomimetic applications in robotic design. Our experiments covered various typical outdoor terrains, such as step-like structures, rugged terrains, and uneven surfaces. The findings from these experiments have important implications for the future development of terrestrial robot swarms. They highlight the potential applications in diverse real-world scenarios, including search and rescue, environmental monitoring, and infrastructure maintenance, among others. By continuing to explore and integrate nature-inspired designs, future research can further enhance the operational capabilities of robotic swarms, making them more adaptable and effective in facing the complex challenges of outdoor environments.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in