Guidance of micromotors on flat chemical patterns
Published in Materials


In our recent work, we address this challenge and demonstrate that charged colloidal Janus micromotors can serve as a model system of ‘macro-ions’ moving in the microscopic assembly. While the motion of such spherical Janus micromotors is light activated, guidance of their motion is provided by the interaction of the particles with the complex chemical pattern possessing the surface charge distribution (see Figure, bottom left). These topographically flat charged patterns are realized on a chemically functionalized substrate containing regions of positive and negative Zeta potentials, which enable long-range (attractive and repulsive) potentials affecting the motion of charged Janus particles.
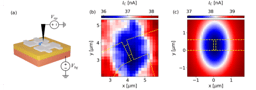
The charged pattern was prepared by immobilizing self-assembled monolayer (SAM) of (3-Aminopropyl) triethoxysilane (APTES) at the glass surface to achieve positively charged surface and 5-nm-thick gold layer to achieve negatively charged surface (Figure, top left). Exploring the ionic self-diffusiophoresis propulsion mechanism of Janus particles in the presence of these electrostatic potentials, unconventional behavior was observed at the APTES/gold interface . Instead of crossing the flat boundary, around 80% of positively charged Janus particles in our experiment are reflected from the flat negatively charged interface. We revealed two types of reflection of Janus particles from the APTES/gold interface: (i) two-dimensional (2D) rotation of the cap when the reorientation of the cap occurs within the substrate plane, and (ii) three-dimensional (3D) rotation of the cap when the particle reorients via an out-of-plane rotation of the cap.
Janus particles are light-activated Ag/AgCl/β-FeOOH/PS micromotors (see Figure, top right) that release Cl- and H+ ions and achieve self-propulsion, due to the ionic self-diffusiophoresis mechanism. The difference in the diffusivity between Cl- and H+ ions results in a self-generated inward-pointing electric field around a Janus micromotor. This field induces propulsion of Janus micromotors and electroosmotic flows (EOFs) along the surface of the charged substrate. The specific profile of the EOF at the charged pattern interface results in a decrease of the velocity of Janus particles when approaching the interface and prevents the particles from crossing the interface.
By utilizing this reflection mechanism, we proposed a novel method to steer Janus motors along desired complex trajectories by following the interfaces between the charged patterns (see Figure, bottom right). The images summarize the experimental results demonstrating the guidance of Ag/AgCl/β-FeOOH/PS Janus particles through diverse pattern geometries, e.g., linear channels, a square-shaped track geometry, and a circular pattern. Janus micromotors also reveal a rather complex motion in a circular ring pattern and a square array of circular patterns. A Janus micromotor can bypass isolated circular gold patterns by turning the direction all the time. This behavior does not reveal pinning to the circle wall as previously reported, and is characterized by multiple reflections of a Janus micromotor from a soft wall. We further demonstrate the ability to focus and filter Janus particles using flow-focusing constrictions with a gradually changing the ratio of the particle diameter to the constriction width, from 0.14 to 1.1. These geometries successfully focus Janus micromotors towards the narrowest region and guide them through a narrow constriction.
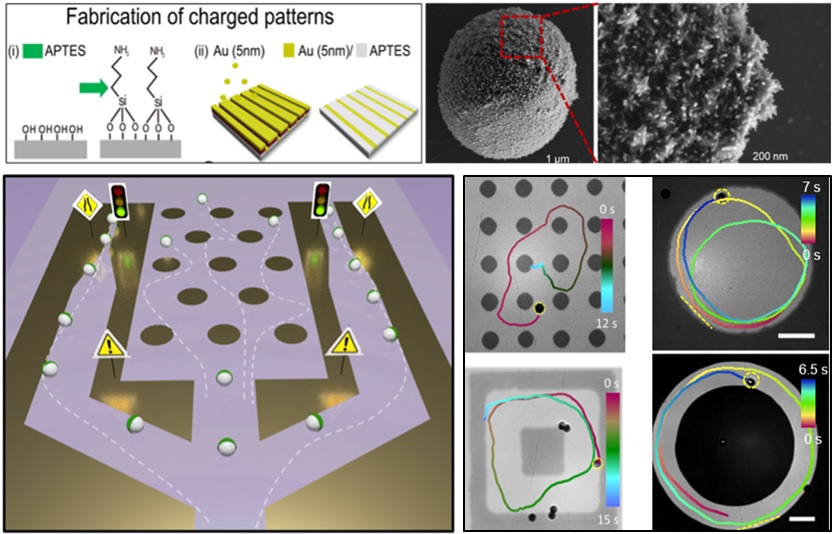 Figure: (top left) Realization of the flat chemical pattern with the positive and negative charges; (top right) SEM image of Ag/AgCl/ β-FeOOH/PS Janus micromotors, Scale bar: 1 µm. Inset: magnified SEM images of the PS-coated side of the particles. Scale bar: 200 nm. (bottom left): Concept figure showing a Janus micromotor moving in a complex pattern with soft walls. Dashed lines correspond to the trajectories of Janus micromotors. (bottom right) Navigation of Janus micromotors through various complex patterns. Optical micrograph of Ag/AgCl/β-FeOOH/PS Janus particles (labeled with a yellow dashed circle) on an APTES/Gold charged pattern. While the darker areas correspond to negatively charged gold, the brighter areas are positively charged APTES. The line with color mapping represents the trajectory of a Janus micromotor. The color-coded scale represents the observation time from the initial state (red) to the final state (blue). Scale bars: 10 μm
Figure: (top left) Realization of the flat chemical pattern with the positive and negative charges; (top right) SEM image of Ag/AgCl/ β-FeOOH/PS Janus micromotors, Scale bar: 1 µm. Inset: magnified SEM images of the PS-coated side of the particles. Scale bar: 200 nm. (bottom left): Concept figure showing a Janus micromotor moving in a complex pattern with soft walls. Dashed lines correspond to the trajectories of Janus micromotors. (bottom right) Navigation of Janus micromotors through various complex patterns. Optical micrograph of Ag/AgCl/β-FeOOH/PS Janus particles (labeled with a yellow dashed circle) on an APTES/Gold charged pattern. While the darker areas correspond to negatively charged gold, the brighter areas are positively charged APTES. The line with color mapping represents the trajectory of a Janus micromotor. The color-coded scale represents the observation time from the initial state (red) to the final state (blue). Scale bars: 10 μm
Chemically flat charged patterns enable soft long-range potentials, leading to the formation of ‘soft walls’, affect the motion of the charged Janus particles, and reveal the ability of guiding, flow focusing, and 'filtering' Janus particles. The diverse behavior of Janus micromotor is based on the complex electro-osmotic flows arising between the Janus micromotors and the charged patterns.
Our results deliver a new knowledge on the electro-kinetic transport of biochemical species, as well as on the control of species in fluidic samples in microscale confinement, relevant for the field of ionotronics.
For further information, please read our published article in Communications Materials entitled “Electrokinetic Janus micromotors moving on topographically flat chemical patterns” DOI: 10.1038/s43246-022-00282-y
Follow the Topic
-
Communications Materials

A selective open access journal from Nature Portfolio publishing high-quality research, reviews and commentary in all areas of materials science.
Related Collections
With Collections, you can get published faster and increase your visibility.
Advanced characterizations of high-entropy materials
Publishing Model: Open Access
Deadline: Mar 31, 2026
Multifunctional hydrogels
Publishing Model: Open Access
Deadline: Feb 28, 2026

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in