Mean-shift exploration strategy greatly improves the efficiency of robot cooperation
Published in Electrical & Electronic Engineering

Background: In nature, groups of insects and animals can self-assemble various spatial shapes that are functional for the groups adapting to the environments. As a remarkable example, army ants can assemble shapes to transport food cooperatively or construct bridges using their bodies to overcome spatial gaps. These shape assembly behaviors exhibit strong tolerance of individual faults and can easily scale up to thousands or even millions of individuals.
The fascinating behaviors of biological systems have inspired extensive studies on robot swarms. An important problem in robot swarms is to assemble a desired shape in a locally distributed manner. Shape assembly can be applied to achieve challenging tasks such as cooperative cargo transportation and complex environment exploration.
The shape assembly problem has a unique technical challenge compared to other swarming problems: the desired shape in shape assembly is a global constraint for all the robots. This constraint triggers a competitive relationship among cooperative robots. This competing relationship brings great challenges for achieving highly-efficient shape assembly of large-scale robot swarms.
This competing problem is often solved by goal assignment in traditional methods. However, when robots are assigned unreasonable locations or fail to function normally, additional algorithms for fault-tolerant detection and goal re-assignment are required to handle such situations, which results in lower efficiency and less adaptability.
New Strategy: Recently, researchers developed a new coordination strategy for shape assembly of robot swarms based on the idea of mean-shift exploration. The comparison with the state-of-the-art methods shows that the proposed strategy can greatly improve efficiency, especially for large-scale swarms. The efficiency improvement is more obvious as the swarm scale increases. Moreover, the mean-shift strategy does not rely on goal assignment. As a result, it is naturally tolerant to faults and adaptative to swarm scale variants. The proposed strategy can also be extended to generate various interesting behaviors including shape regeneration, cooperative cargo transportation, and complex environment exploration.
Overview: The proposed shape assembly strategy consists of three components, a human-swarm graphical interface, a distributed interpretation negotiation, and a distributed control algorithm. The core of the proposed strategy is mean-shift exploration: when a robot is surrounded by neighboring robots and unoccupied locations, it would actively give up its current location by exploring the highest density of nearby unoccupied locations in the desired shape.

Platforms: A swarm system including 50 holonomic wheeled Rainbow robots is developed on the base of the proposed strategy.

Complex Shape Assembly: The proposed strategy can assemble nonconvex complex shapes. One representative complex shape is the snowflake that contains rich tiny branches. With the proposed strategy, the robot swarm can assemble the snowflake shape without trapping in local minima. Moreover, the swarm can assemble different nonconvex shapes and switch from one to another smoothly.
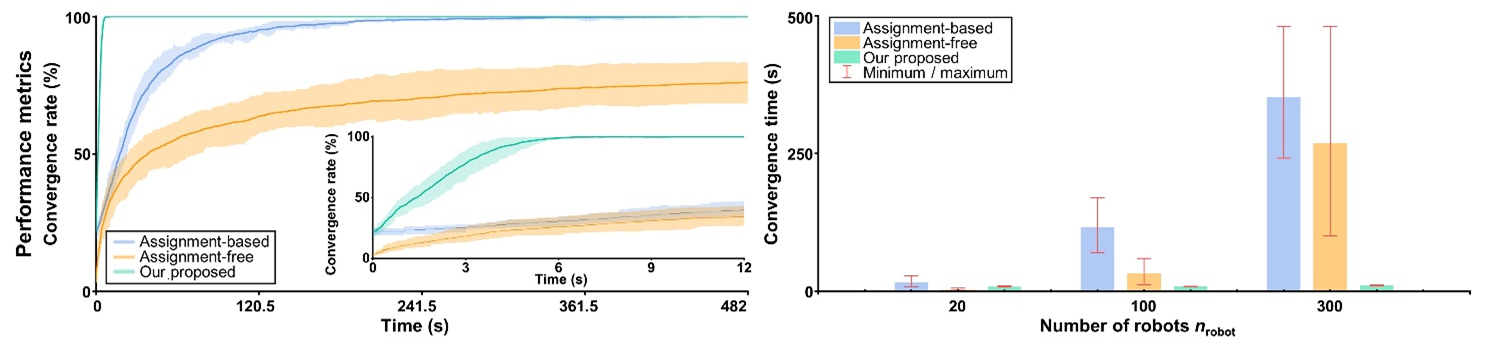
High Efficiency: Compared to the state-of-the-art methods, the proposed strategy improves the convergence efficiency dozens of times for large-scale swarms. The efficiency improvement is more significant as the swarm scale increases.
Adaptability: The proposed strategy is naturally adaptive to individual faults because it does not rely on any goal reassignment algorithm. When some robots leave the swarm, the remaining robots can autonomously assemble the desired shape without any fault detection or fault-tolerant control algorithms. This endows the robot swarm with a certain regeneration capability.
Cooperative transportation: Being able to track moving shapes is an important feature of the proposed strategy. An important application is cooperative cargo transportation. In this task, robots follow informed robots to track the desired trajectory while maintaining a desired shape, thus achieving cargo transportation.
![]()
Environment exploration: The proposed strategy can also be applied to environment exploration tasks. Even in the presence of many nonconvex corners in a maze, the swarm can successfully fulfill the maze without getting deadlocked due to its strong exploration ability.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Healthy Aging
Publishing Model: Open Access
Deadline: Dec 31, 2026



Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in