MiTra: A Drone-Based Trajectory Data for an All-Traffic-State Inclusive Freeway with Ramps
Published in Research Data, Computational Sciences, and Civil Engineering
Why is traffic so frustrating, and what can we do about it?
We’ve all experienced it: you're in your car, everything’s moving fine, and suddenly, you're crawling. No crash, no construction, no visible reason. Just… traffic. These so-called “phantom jams” are often the result of subtle human behaviors: a late lane change, a hesitant merge, a sudden brake tap. These subtle behaviors ripple backward through traffic, creating shockwaves that eventually become full-blown congestion.
To fix traffic problems, such as using simulations, we first need to understand how people really drive. Not in theory. Not in a lab. But on real roads, under real conditions—merging, weaving, slowing down, and speeding up based on what’s happening around them. How do drivers behave in heavy traffic? How do they respond to nearby vehicles or decide when to change lanes? These answers require real-world data—precise, high-resolution data.
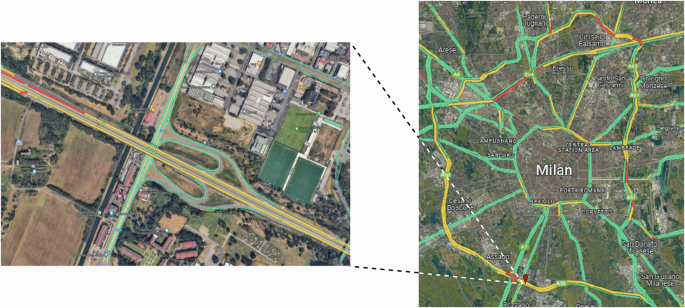
That’s where MiTra (Milan Trajectories) comes in. “Mitra” also means “friend” in Sanskrit, reflecting our hope that this dataset becomes a helpful companion to the research community. It’s a drone-based traffic dataset that captures detailed vehicle movement across all types of traffic—from free flow to complete congestion—on a major urban freeway, A50, in Milan, Italy.
And because good data is the foundation of good solutions, we’ve made MiTra publicly available for researchers, city planners, traffic engineers, and AI developers. Whether you're building a traffic simulation, testing autonomous driving models, or exploring how lane changes trigger slowdowns, MiTra provides the detail you need.
Behind the Scenes: What It Took to Record This Data

Using drones to study traffic may sound straightforward, but in practice, it took a lot of planning, coordination, and creative problem-solving.
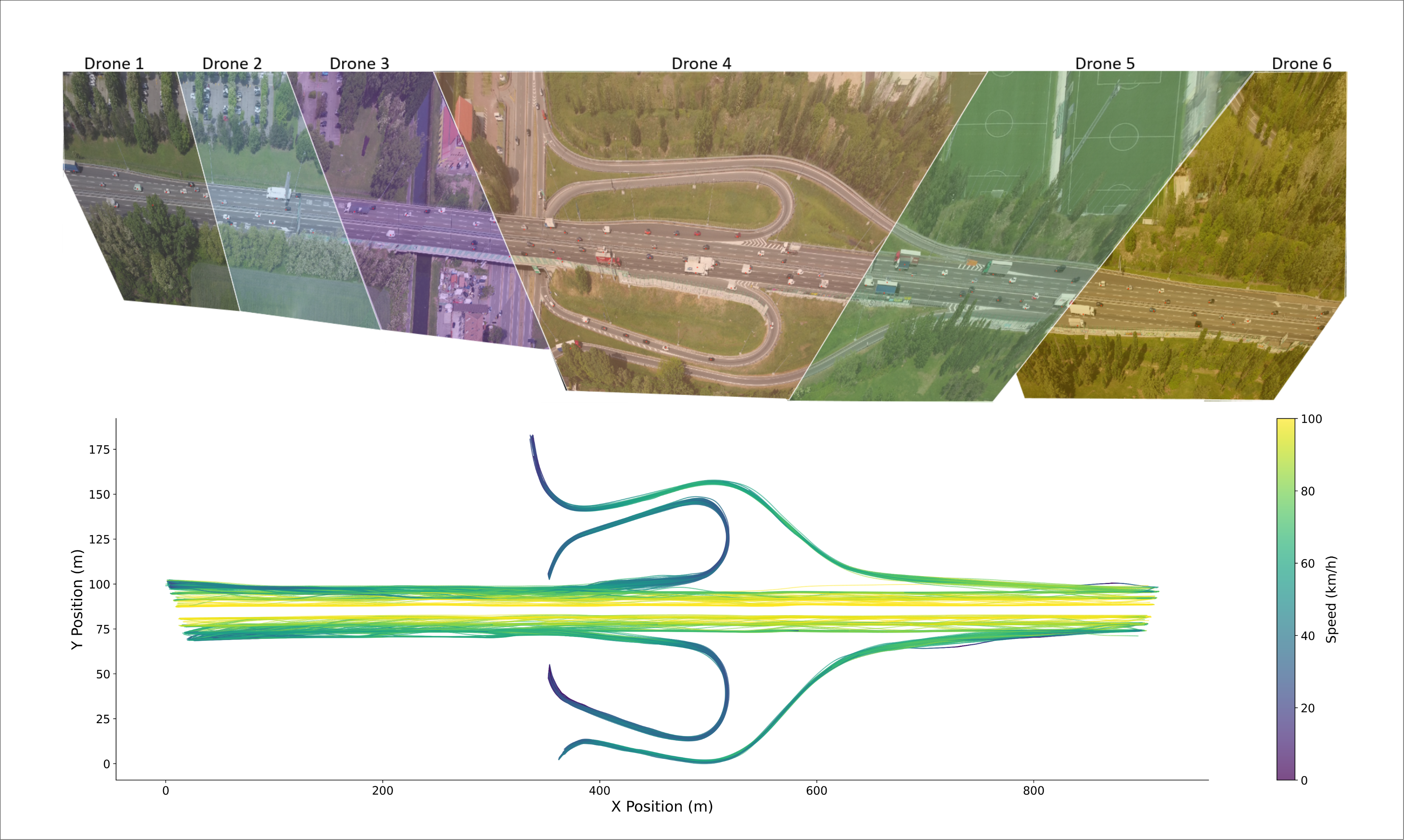
We chose drones because they’re mobile and flexible, perfect for recording areas without fixed infrastructure like bridges or towers. Our original plan was to use three drones to cover a 900-meter stretch of urban freeway. But new drone regulations limited us to a maximum flying height of 120 meters, meaning we’d need six drones flying in parallel to cover the full stretch with sufficient detail.
We even considered using a helicopter flying at 800 meters, but that wouldn’t capture smaller vehicles like motorcycles, and the video stability wouldn’t have been good enough for high-precision tracking.
Coordinating six drones is no small feat. All pilots had to take off, hover, and start recording at the same time, then stop together to ensure the footage could later be stitched seamlessly. Before the actual flights, we ran multiple test flights to fine-tune drone positions and ensure enough overlap between views for accurate stitching.
And then there was the battery challenge. Drones can only fly for a short time on one charge, so the team had to bring multiple battery packs and fast chargers, cycling through them throughout the day while keeping everything synchronized.
One unexpected challenge: regulations prevented us from flying directly over the road. We had to offset each drone about 130 meters to the side, which meant recording the road from an angle instead of straight above. While this worked well overall, it did create some challenges: alignment between drone views wasn’t always perfect, and occasionally, smaller vehicles were hidden behind larger ones like trucks. If regulations permit, we recommend recording directly above the roadway for maximum accuracy.
In the end, it was a complex operation—but one that paid off with a dataset we believe will be extremely valuable to the research community.
Watch the behind-the-scenes video here: MiTra_Recording
We’d like to extend a sincere thank you to the DataFromSky team for their trajectory extraction and coordination with the drone pilots from Immagini al Volo, whose skill made this complex operation possible.
What Makes MiTra Unique?
Unlike past datasets that focused only on free-flow traffic or covered short segments without ramps or used limited camera views, MiTra offers:
- All traffic states from free-flow to congestion—captured naturally at the same location
- Merging and diverging ramps, with realistic driver behavior
- Raw video + stitched trajectories, tracking vehicles across the entire stretch
- Over 124,000 vehicle trajectories, including 52% with lane changes
- 5 vehicle types: cars, buses, trucks, medium vehicles, and motorcycles
- Trajectory data includes speed, acceleration, lane, and IDs of surrounding vehicles (e.g., leader/follower)
And unlike many datasets, we’re also sharing the raw drone video footage, which is especially valuable for computer vision researchers developing new vehicle detection and tracking models.
What Traffic Really Looks Like — From Above
One of the most exciting things about using drones for traffic research is that you get a bird’s-eye view of how traffic flows—and sometimes, how it doesn’t.
To help illustrate the variety of traffic states we recorded, here are three actual snapshots from our dataset, more detailed extracted data can be seen in our paper:
Free-Flow
Vehicles move quickly with plenty of space between them—minimal interaction, smooth driving.

Dense Traffic
Vehicles are closer together, and interactions become more noticeable.

Congested Traffic
Stop-and-go waves dominate. Traffic slows significantly, and lane changes become challenging.

These variations captured naturally over time allow for powerful analysis of traffic transitions, all within a consistent environment.
Ready to Explore?
MiTra is open and ready for you and available at OPARA. Whether you're researching traffic behavior, building smarter mobility systems, or developing AI for autonomous vehicles, this dataset is your starting point. Dive in and see what real-world traffic looks like from above.
Follow the Topic
-
Scientific Data
A peer-reviewed, open-access journal for descriptions of datasets, and research that advances the sharing and reuse of scientific data.

Related Collections
With Collections, you can get published faster and increase your visibility.
Genomics in freshwater and marine science
Publishing Model: Open Access
Deadline: Jul 23, 2026
Computer vision in plant science and agriculture
Publishing Model: Open Access
Deadline: Jul 10, 2026




Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in