Photothermal modulated dielectric elastomer actuator for resilient soft robots
Published in Materials

Dielectric elastomer actuators (DEAs) are a class of soft actuators that have been known as artificial muscles due to their large actuation strains, rapid speeds, and high energy densities. However, the soft materials behind these devices tend to be mechanically weak and susceptible to damage from large tensile loads or sharp objects. After damage, the material loses its functionality and is discarded, generating waste. While previous works have achieved self-healing DEAs that can recover their performance after damage, these devices do not have high strength and toughness that aids in resisting external damages. This is attributed to the increased stiffness that is often accompanied by mechanical enhancements that impede actuation strains or raise the driving electric field requirements. To address this, we introduce the concept of co-stimulation in pursuit of a resilient DEA with high actuation performance.
What is co-stimulation?
Co-stimulation refers to applying two stimuli concurrently to achieve a particular function. This can be seen in athletes warming up their muscles before an exercise. While muscles are activated by neural electrical signals, the addition of a co-stimuli to raise the body temperature results in increased blood flow to the muscles, improving their performance.
Inspired by this, we applied co-stimulation of NIR light and electric fields to achieve resilient DEAs with high actuation performance. Resilient DEAs were based on polyurethane elastomers that were functionalized with carboxyl groups to form dynamic physical crosslinks through hydrogen bonding. As such, the elastomer could achieve high toughness (96.5 MJ m-3) and tensile strength (18.5 MPa) suitable for resisting damage. Subsequently, liquid metal nanoparticles (LMNPs) were introduced to the matrix due to their unique ability to increase dielectric constants and concurrently impart photothermal capabilities to the elastomer, enhancing responses to electric field and NIR light respectively.
LMNPs enhanced the resilient nature of DEAs in the following manner.
1) Mechanical toughness of nanocomposites was enhanced due to effective load transfer from the polymer chains to LMNPs through interfacial interactions.
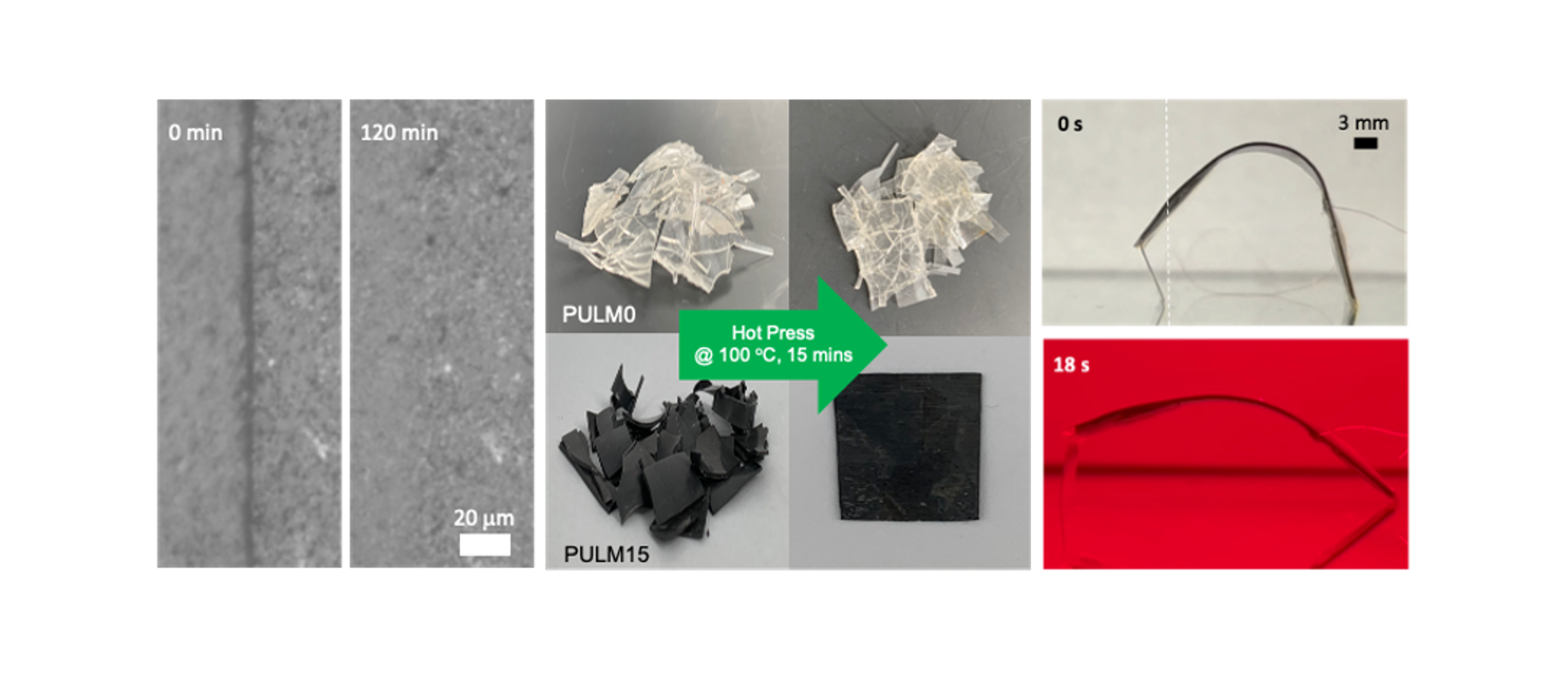
2) When illuminated by NIR light, these nanocomposites realized self-healing in a contactless manner as photothermal effects accelerated the reformation of broken hydrogen bonds (Fig. 1a).
3) Nanocomposite can be recycled at lower temperatures and shorter times compared to the pristine, as hydrogen bonds between the nanoparticles and the matrix lowered energy barriers for topological re-arrangement (Fig. 1b). With recycling procedures, the DEA could recover its actuation performance even after being cut into many pieces or electrical failure (Fig. 1c,d), achieving area strains of 57.1% and 34.2% respectively.
Based on these properties we achieved both the toughest and best-performing DEA with recoverable actuation area strains.
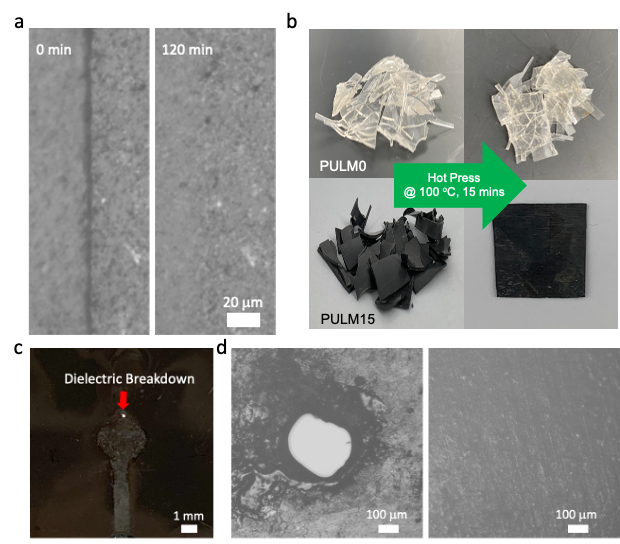
Fig. 1: Self-healing and recyclability of the nanocomposite. a Optical microscope images of nanocomposite damaged (left, 0 min) and healed after 120 min under NIR light of 0.2 W cm−2. b Digital images of PULM0 (0 wt% LMNPs) and PULM15 (15 wt% LMNPs) waste material before and after hot-pressing at 100 °C for 15 min. PULM0 failed to be recycled while PULM15 was successfully recycled into a film. c Hole observed at the electrode area is attributed to dielectric breakdown. d Optical microscope image of dielectric breakdown site and the same site after undergoing the recycling process.
Effects of co-stimulation
During co-stimulation, NIR light is applied to induce photothermal effects of LMNPs that soften the elastomer. The degree of modulus reduction can be controlled by tuning the NIR light intensity while simultaneously applying the electric field. As the DEA is softer, lower driving electric fields are required to achieve high actuated area strains.
When configured to a bilayer structure, the actuator can respond to both electric fields and NIR light, based on Maxwell pressure and asymmetrical thermal expansion mechanisms respectively. Under co-stimulation, a synergistic effect is realized between both mechanisms that allow the actuator to bend at larger degrees compared to the expected additive effects when driven by electric field and NIR light individually. When the bilayer structure was used for a soft robotic crawler, photothermal effects enabled longer strides and increased the flattening of its body for enhanced shape adaptability to move across narrow spaces (Fig. 2). With our co-stimulation strategy, resilient elastomers can now be applied to soft robots and devices to achieve longer operational lifetimes and improved actuation capabilities.
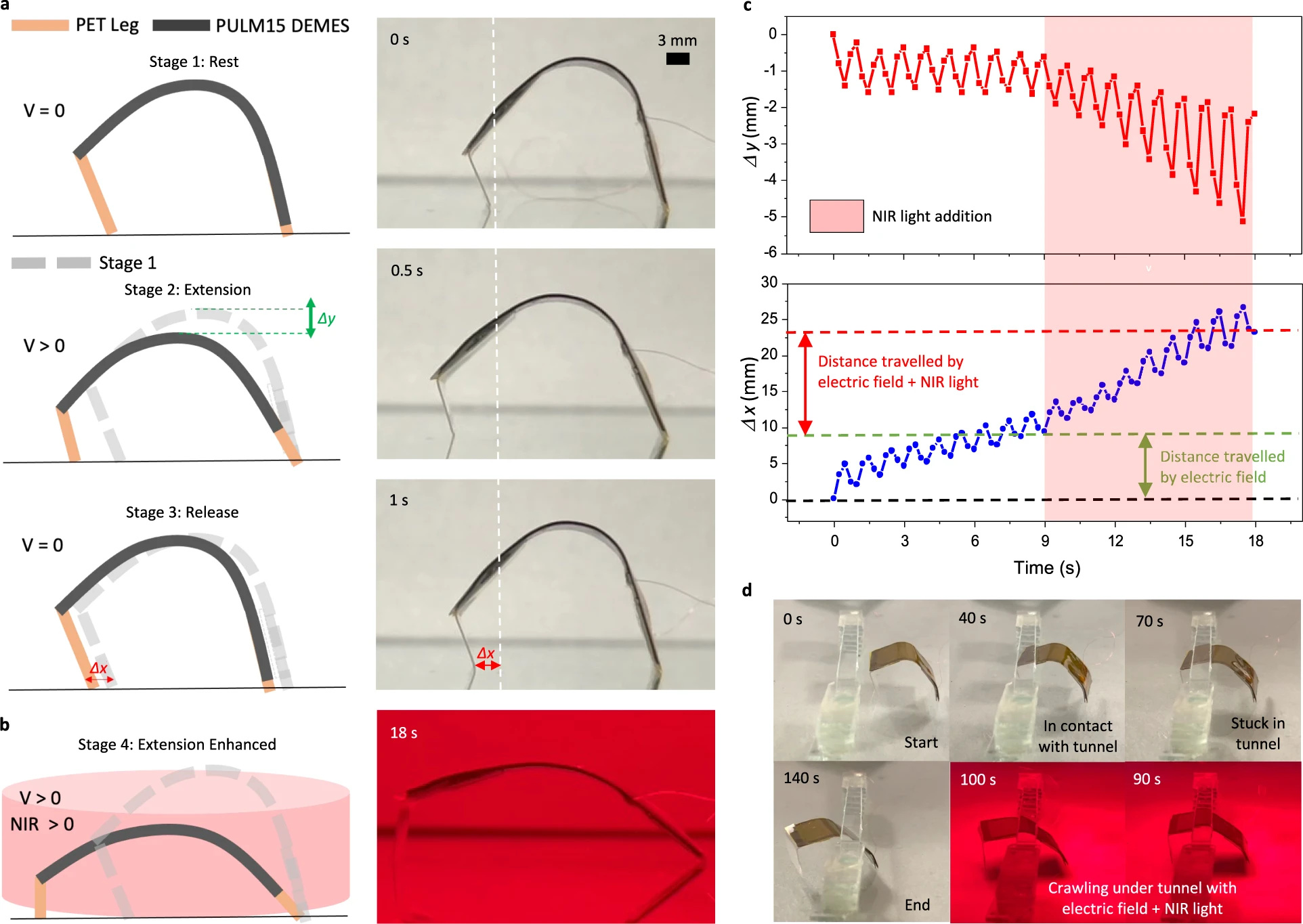
Fig. 2: Locomotion analysis of DEMES crawler. a Schematic and digital images of the working principle of two-anchor crawling locomotion of a DEMES crawler. When a voltage (V) is applied, the crawler flattens and extends to give a vertical (Δy) and lateral displacement (Δx). After the voltage is removed, asymmetric friction from the bent front PET leg enables the crawler to crawl forward. b Schematic and digital image of the usage of NIR light as a secondary control to increase the stride of the crawler, with larger Δx and Δy. c Δy and Δx of two-anchor crawling locomotion as a function of time. First, the crawler was driven by an electric field of 35 V μm−1 at 1 Hz. After which, NIR light (0.4 W cm−2) was applied continuously while the crawler was driven by the same electric field. When NIR light was applied, the enhanced stride led to a larger distance traveled. d Digital image of the crawler driven by 35 V μm−1 at 1 Hz to crawl under a low tunnel (width 50 mm × length 5 mm × height 18 mm). When the crawler comes into contact with the tunnel (40 s), it first attempts to adapt its body to crawl under the tunnel based on its soft and flexible nature (40–70 s). Due to the larger height of the crawler, it eventually gets stuck in the tunnel. When NIR light is applied, the crawler is able to release itself to crawl through the tunnel due to a larger vertical displacement generated during crawling.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Biosensing
Publishing Model: Hybrid
Deadline: Sep 30, 2026


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in