Tap, tap, tap: three is plenty for windy flight
Published in Computational Sciences and Mechanical Engineering
I recently moved to Baltimore Maryland, USA, and while walking through the city I’ve had the pleasure of witnessing peregrine falcons soar, dive, and bank between buildings as they hunted flocks of starlings murmurating for the fall migration. During these walks I’d cross streets and experience blasts of wind, leaving me to wonder how these birds of prey can fly so deftly in such erratic conditions. Such a situation exemplifies the challenges faced by small fliers in cities and illustrates why small unpiloted aircraft have yet to enter the urban domain to facilitate the transition toward a smart-city infrastructure. Examining some of the key differences between biological fliers and the traditionally engineered rigid-wing counterparts provides some context for why morphing aircraft designs often draw inspiration from various avian species, using wings that change shape to improve adaptability (Fig. 1).
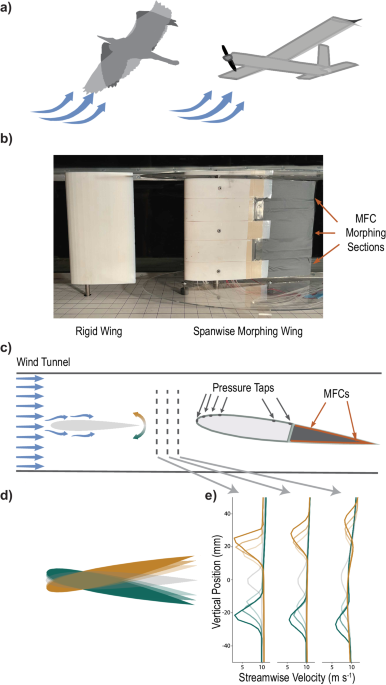
Although large scale dihedral changes, as demonstrated by Lilly the owl for gust rejection purposes1 (Fig. 1), may still prove challenging for practical engineering designs, other morphing modes can modulate aerodynamic forces experienced by a wing to achieve a similar effect (Fig. 2). Specifically, macro-fiber composites contain piezoelectric material that enables the composite to actively extend when a voltage is applied. This extension can be used to change the curvature of a wing to effectively generate or reduce the forces lifting the wing (Fig. 3). However, these smart morphing mechanisms are often subject to temporally nonlinear behaviors that challenge traditional control schemes. For example, repeatedly applying a specific voltage does not always result in the same deflection. Instead, the resulting deflection depends on previous deflections and voltages as well as the amount of time for which each voltage was held. Controlling this type of effector is, therefore, a challenge.
Enter machine learning. In particular, a machine learning based method called deep reinforcement learning (DRL) has shown strong capability in developing controllers for complex situations and environments, including morphing wings2. This technique uses trial-and-error, and is guided by a reward system that encourages preferable actions3. At its base, the method is very similar to how many human and animal behaviors are developed, including how mice can learn to navigate a maze when rewarded with cheese.

on the trailing edge of the wing.
To date, the cutting-edge examples of gust rejection rely on extensive sensing capabilities to estimate the wing shape and forces experienced by the wing in a gusting environment4. This requires expensive computation that can be severely limited by power and weight constraints on-board small aircraft. For this reason, we decided to use deep learning to explore gust rejection from a reduced-sensing perspective. We expected learning on the physical hardware environment would enable an intelligent controller to effectively determine gust rejecting actions from fewer sensors than traditionally employed by a distributed sensor approach. After using DRL to train 20 gust rejecting controllers and performing 3600 gust rejection tests over six gust configurations in three separate flight conditions, we found that the morphing wing was able to reject over 80% of the gusts’ impact on average, using only three pressure tap sensors located near the leading edge of the wing. Additionally, we found that this performance was not statistically different from when six sensors were used.
As a result, this reduced-sensor morphing wing gust rejection technique will open the door to complex city environments for small unpiloted aircraft, resulting in improved intelligence for first responders in urban disaster scenarios. Additionally, this technology can be extended to other complex environments that currently challenge modern aircraft, such as search and rescue in forests or mountains and natural disaster response to flooding and forest fires.
References
- Cheney, J. A. et al. Bird wings act as a suspension system that rejects gusts. Proc. R. Soc. B: Biol. Sci. 287, 20201748 (2020).
- Haughn, K. P., Gamble, L. L. & Inman, D. J. Deep reinforcement learning achieves multifunctional morphing airfoil control. J. Compos. Mater. 57, 721–736 (2023).
- Sutton, R. S. & Barto, A. G. Reinforcement Learning: an Introduction (MIT Press, 2018).
- Wang, X., Mkhoyan, T., Mkhoyan, I. & De Breuker, R. Seamless active morphing wing simultaneous gust and maneuver load alleviation. J. Guid. Control Dyn. 44, 1649–1662 (2021).
Follow the Topic
-
Communications Engineering
A selective open access journal from Nature Portfolio publishing high-quality research, reviews and commentary in all areas of engineering.

Related Collections
With Collections, you can get published faster and increase your visibility.
Engineering Solutions in Wind Energy Systems: Design, Efficiency, and Sustainability
Publishing Model: Open Access
Deadline: Sep 30, 2026
Sensing Technologies for Crop Health and Growth
Publishing Model: Hybrid
Deadline: Jul 31, 2026


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in