4D Artificial Skin
Published in Electrical & Electronic Engineering

Many mammals have whiskers, which are a sensitive type of hair. The hair follicles of whiskers connect with the nerve endings and neural networks, so they are sensitive to the near environment, e.g., the vibration or the change of airflow. Whiskers are essential to many animals as they can provide additional senses, especially in situations where the vision or other touch function is lost. There is extensive knowledge of how animals use their whiskers to interrogate their surrounding environment. It is also understandable that all animals use this unique sense to explore their surroundings in real-time. The whiskers of mammals give us great inspiration to create sensors with similar principle for machines and robots as artificial touchless skin. Fig. 1, a Seal and a Persian cat with their whiskers. In fact us humans, are the only mammals not using whiskers for sensing.


Fig. 1 A Persian Cat and a Seal both with whiskers
Nature also gives us another important clue through amazing electric fish. The electric fish can generate and detect the electric field continuously. They use the electrical signals to self-protect or hunt (Fig. 2). But more importantly, the electric field generated by electric fish is a vital tool for them to communicate with each other and sense their surroundings. The scientific area of converting the electrical field data to the location and/or type of object(s) in fish's vicinity is so-called "inverse problems". Although almost all of the inverse problems are man-made as you working out from the physical models and measurements to identify the objects, the electric fish seems to solve this mathematical problem naturally. Again, it is certain that the fish sense their environment through the electric field in real-time.
Fig. 2 Electric field emitting and detecting fish
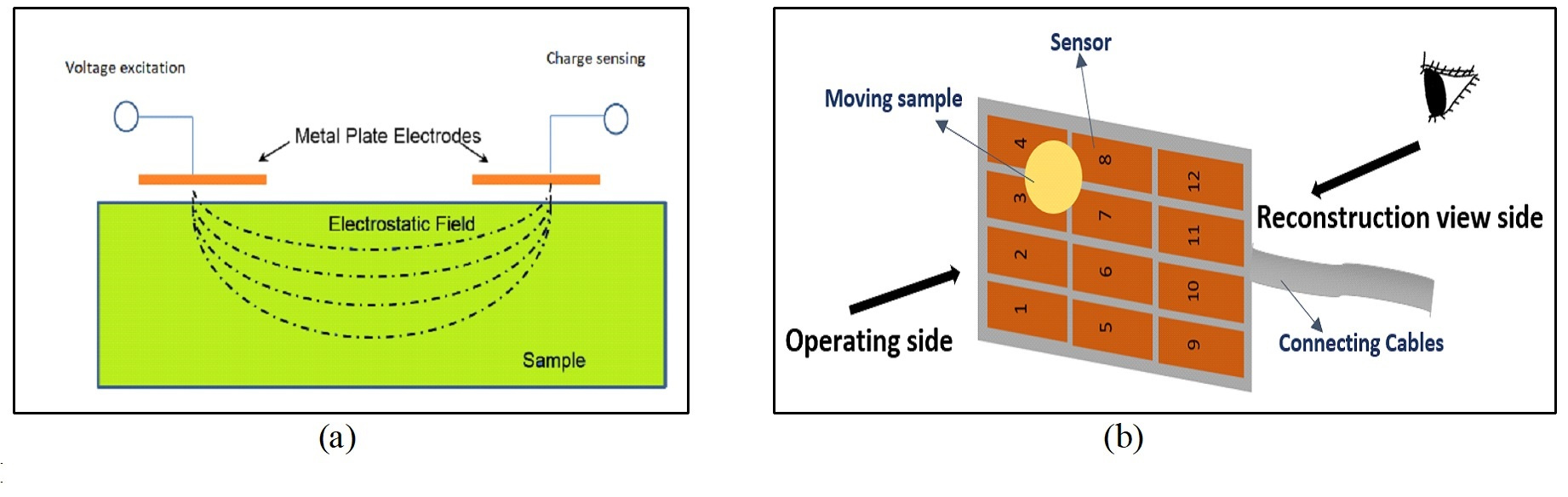
Inspired by these amazing natural phenomena, we have developed a contactless e-skin electrode array that works by sensing the electric fields in its surrounding environments. It enables to detect the objects in its vicinity and recover the movements and path of the objects in a 4D manner with time and space information. When it is used with an intelligent machines such as robots, the 4D recovery of the obstacles and objects near to the sensor array will give the machines natural sensing as well as the opportunities for the predictive reactions. Something similar to electric fish. To achieve this application, we developed a planar array capacitive imaging sensor with the 4D image reconstruction algorithm. A diagram of the main components of such a system is shown in Fig. 3.
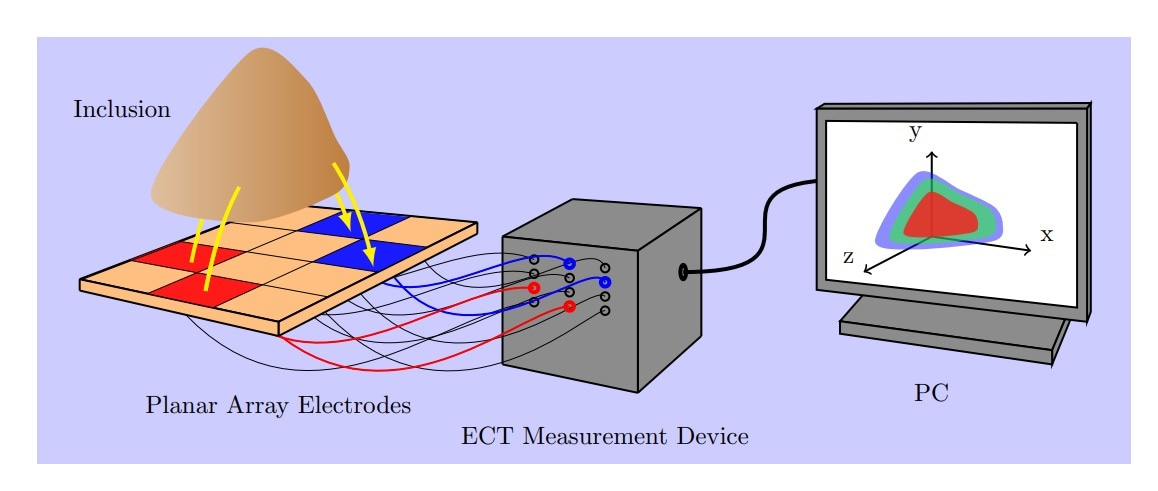
 Fig. 3 A capacitive imaging sensor for touchless e-skin.
Fig. 3 A capacitive imaging sensor for touchless e-skin.
A number of possible usages for such a sensor can be found in our work. The touchless e-skin sensor has many more potential applications, not limited to the experiments we have demonstrated. In terms of human-machine interaction, we showed the principle of an in-air handwriting as a complex natural communication between a human and a machine. In the same way, the sensor can be further developed as the touchless keyboard and touchless screen. Such touchless applications that allow multiple functionalities can be very beneficial from the point of view of public health and infection control. With an interface medium, it is possible to create pressure and force sensing, which again can be done without contact with the sensor array itself. This sensor can be very useful for collision detection in short distance, based on the examples shown in the paper an object path was detected and created for 100 steps around the sensor array. 4D detection means that not only we can locate the obstacle, but we can also work out the speed of the movement of the obstacle and as per electric fish react based on our predication of the next locations. The sensor can be made as flexible array and it can also be made in large area or smaller areas, making it possible to use in many different situations. The 4D skin through its functional operation enables a more natural social interactions with Robots or between Robots with or without touch. An example is shown in Fig. 4 where a surface deformation and a proximity sensing can be visualised. More can be seen from the article: https://www.nature.com/articles/s41598-020-68432-1

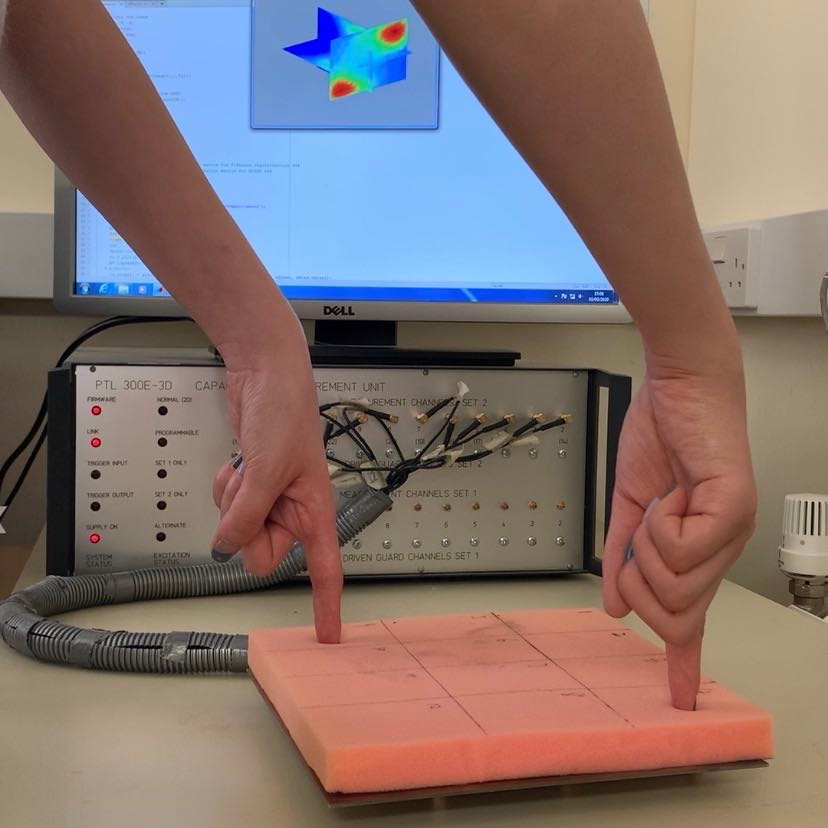





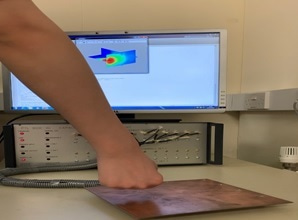




 Fig. 4 Detection of two points via an interface medium and from a distance (experimental pictures are curtesy of the first author Gege Ma)
Fig. 4 Detection of two points via an interface medium and from a distance (experimental pictures are curtesy of the first author Gege Ma)
Earlier works involves a fabric based artificial skin using impedance imaging and with helps from machine learning (Fig. 5). https://www.nature.com/articles/s41598-019-45484-6
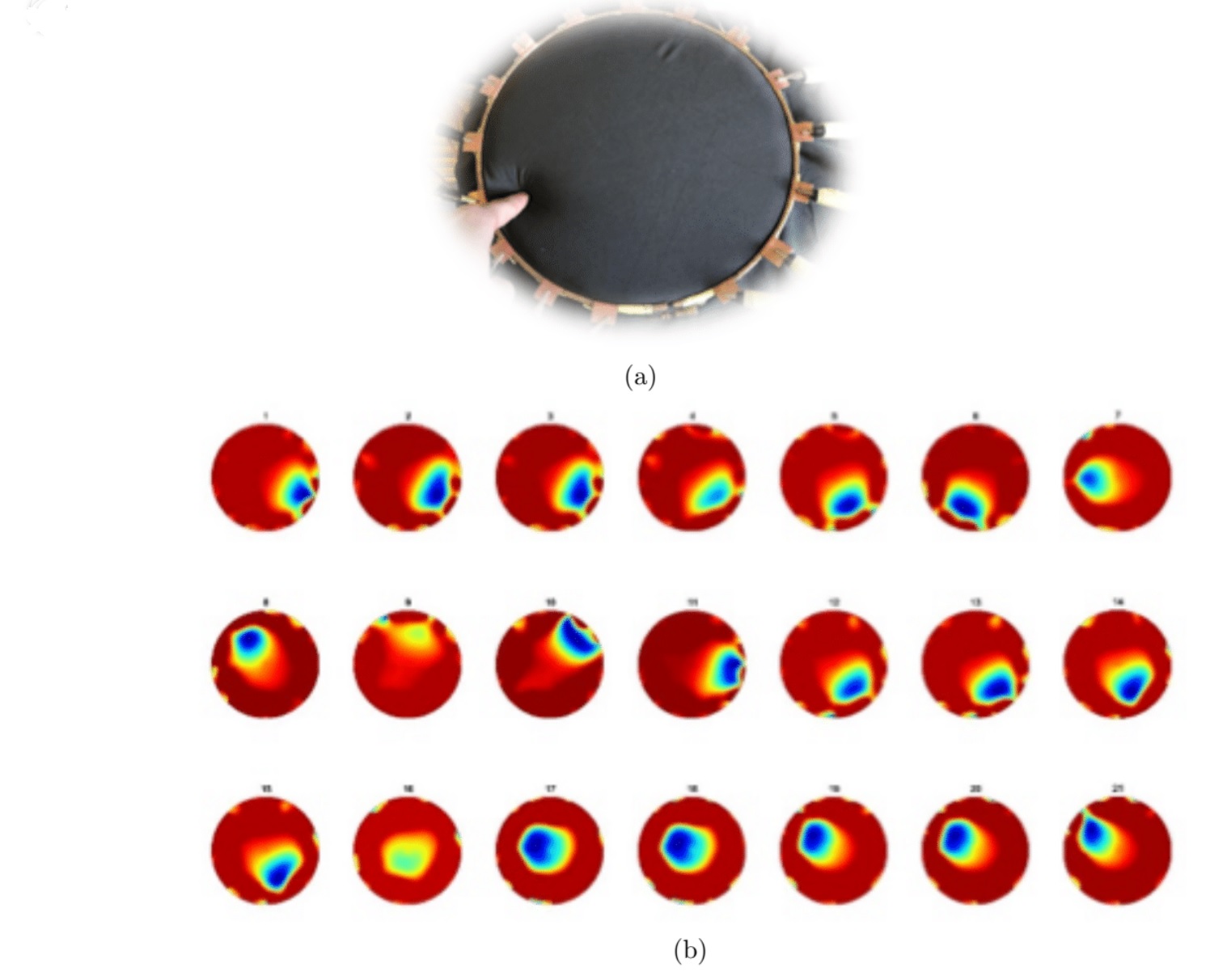
Fig. 5 Pressure and touch sensing using conductive fabric and impedance imaging
A further list of recent references from our team is here:
[1] Complex conductivity reconstruction in multiple frequency
electrical impedance tomography for fabric based pressure
Yang, C. L., Mohammed, A., Mohamadou, Y., Oh, T. I. & Soleimani, M., 2015,
In : Sensor Review. 35, 1, p. 85-97
[2] EIT-based fabric pressure sensing
Yao, A., Yang, C. L., Seo, J. K. & Soleimani, M., 2013,
In : Computational and Mathematical Methods in Medicine. 2013, 9 p., 405325
[3] A pressure mapping imaging device based on electrical impedance tomography
of conductive fabrics, Yao, Y. & Soleimani, M., 2012, In : Sensor Review. 34, 4, p. 310-317
[4] Electrical Impedance Tomography for Artificial Sensitive Robotic Skin:
A Review Silvera-Tawil, D., Rye, D., Soleimani, M. & Velonaki, M.,
2015, In : IEEE Sensors Journal. 15, 4, p. 2001-2016


Follow the Topic
-
Scientific Reports
An open access journal publishing original research from across all areas of the natural sciences, psychology, medicine and engineering.

Related Collections
With Collections, you can get published faster and increase your visibility.
Infectious disease diagnostics
Publishing Model: Open Access
Deadline: Sep 23, 2026
AI in Education
Publishing Model: Open Access
Deadline: Oct 09, 2026

Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in