An Ultrasonic Microrobot Enabling Ultrafast Bidirectional Navigation in Confined Tubular Environments
Published in Bioengineering & Biotechnology and Materials
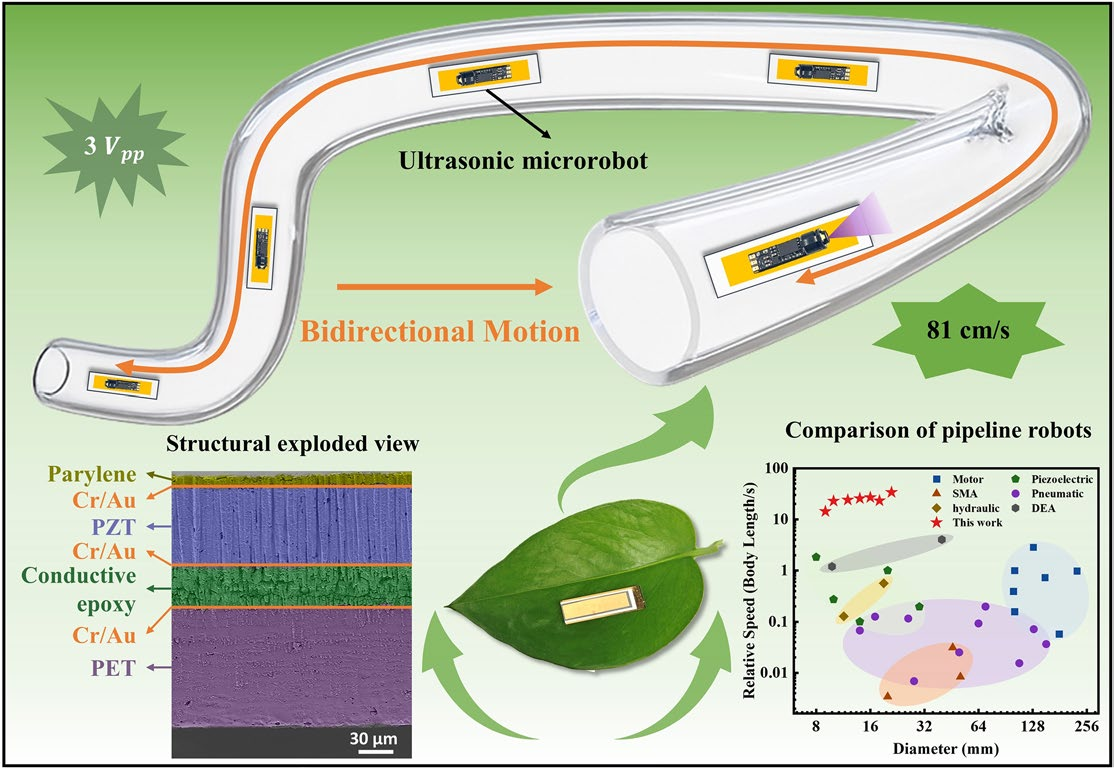
A research team led by Professor Bin Yang from Shanghai Jiao Tong University has developed an ultrasonic microrobot capable of ultrafast bidirectional navigation in confined tubular environments, as reported in Nano-Micro Letters. By integrating frequency-modulated ultrasonic actuation with a flexible piezoelectric composite structure, this work sets a new benchmark for miniaturized robotic inspection systems.
Design Concept
- Bio-Inspired Motion: Inspired by the centipede’s retrograde wave gait, the robot converts ultrasonic vibrations into traveling bending waves, generating controllable thrust through frictional coupling with pipe walls.
- Ultrathin Piezoelectric Structure: The robot integrates a thinned lead zirconate titanate (PZT) film with a flexible PET substrate via MEMS fabrication, encapsulated by a parylene-C layer. The compact design (24 mm × 7 mm × 210 μm, 80 mg) ensures high flexibility and adaptability.
- Frequency-Modulated Direction Control: Bidirectional locomotion is achieved simply by tuning the driving frequency, allowing seamless forward and backward motion without structural adjustment.
Performance Achievements
- Record Speed and Low Voltage: The microrobot reaches a maximum speed of 81 cm s-1, surpassing all reported piezoelectric microrobots. It operates at an exceptionally low driving voltage of 3 Vp-p, two orders of magnitude below dielectric elastomer systems.
- High Adaptability: It maintains stable movement in 4 mm-high pipes, climbs slopes up to 24.25°, and carries loads over 36 times its own weight.
- Environmental Versatility: The robot performs robustly in glass, stainless steel, and PVC pipelines, and even moves across water surfaces, demonstrating superior sealing and environmental tolerance.
Functional Demonstrations
- Real-Time Visual Inspection: A micro-endoscope camera enables real-time imaging inside confined pipelines, proving its potential for internal inspection and diagnostics.
- Application Potential: The system offers a powerful platform for pipeline inspection, medical microdevices, and microfluidic monitoring, where compact and agile robots are essential.
Future Outlook
- Toward Autonomous Systems: Future designs will integrate onboard power units, wireless modules, and micro-batteries for untethered, autonomous operation.
- Expanded Capabilities: Combining sensing, imaging, and manipulation functions will transform this design into a multifunctional micro-inspection system.
With its ultrathin architecture, low power demand, and scalable fabrication, this microrobot establishes a foundation for next-generation intelligent microrobotics in industrial and biomedical applications.
Editor of Nano-Micro Letters, which is an Open-Access, peer-reviewed journal reported papers that have at least one dimension ranging from a few sub-nanometers to a few hundreds of micrometers. The journal is published by Springer Nature and indexed by SCI, EI, SCOPUS, Pubmed, etc. The 2025 JCR Impact Factor is 38.5. The 2025 CiteScore is 58.9.
Follow the Topic
-
Nano-Micro Letters
Nano-Micro Letters is a peer-reviewed, international, interdisciplinary and open-access journal that focus on science, experiments, engineering, technologies and applications of nano- or microscale structure and system in physics, chemistry, biology, material science, and pharmacy.




Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in