Fast Human Motion reconstruction from sparse inertial measurement units considering the human shape
Motion capture is performed to digitally reconstruct the posture and movement of the human body. This technique has extensive applications and is commonly employed in various fields such as virtual reality (VR) and augmented reality (AR), film and game production, human factors analysis, biomechanical analysis, medical rehabilitation, and sports training.
While marker-based optical motion capture methods can achieve very high accuracy, they require complex data post-processing and may be ineffective in the presence of multiple occlusions. Camera-based methods provide a convenient way to estimate human motion, but they cannot guarantee effective motion reconstruction in extreme occlusion environments and often make erroneous estimates due to occlusion between limbs. Using a large number of sensors arranged at various locations on the body can improve the accuracy of reconstruction to a certain extent, but it introduces the complexity of the wearing process and also imposes restrictions on movement. In response to the above problems, this paper proposes Fast inertial Poser (FIP), a human posture estimation algorithm based on 6 sensors. It takes into account the morphological parameters of the human body and designs a tree-shaped kinematic inverse solver, which eliminates the dependence of similar methods on future frames. While ensuring reconstruction accuracy, it reduces the delay and resolution time of motion reconstruction and can achieve stable operation with a 15ms delay and a frame rate of 65FPS on the embedded computer.
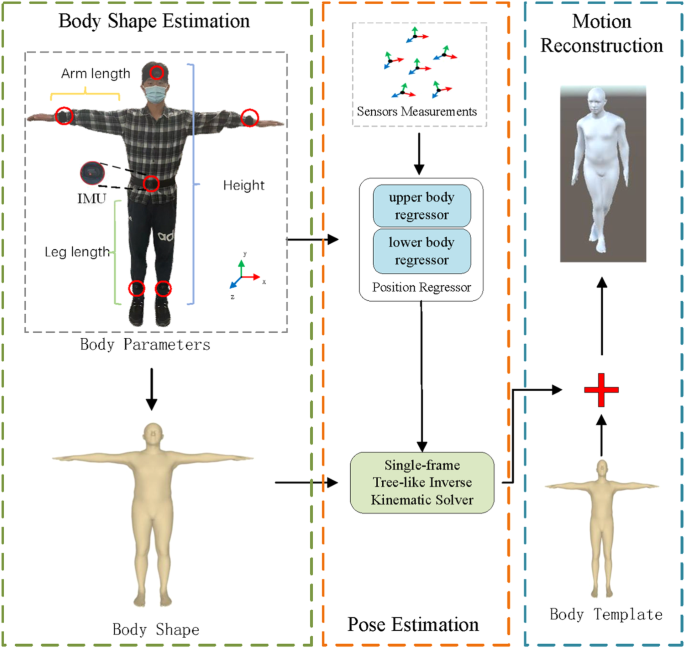
As shown in Fig 1, the influence of human body shape was considered in the reconstruction results and we incorporated a separate module in the algorithm to model the human body shape. This output is integrated into various sub-modules to provide corresponding constraints. From the results, it can be observed that this design significantly improves the accuracy of the reconstruction results.

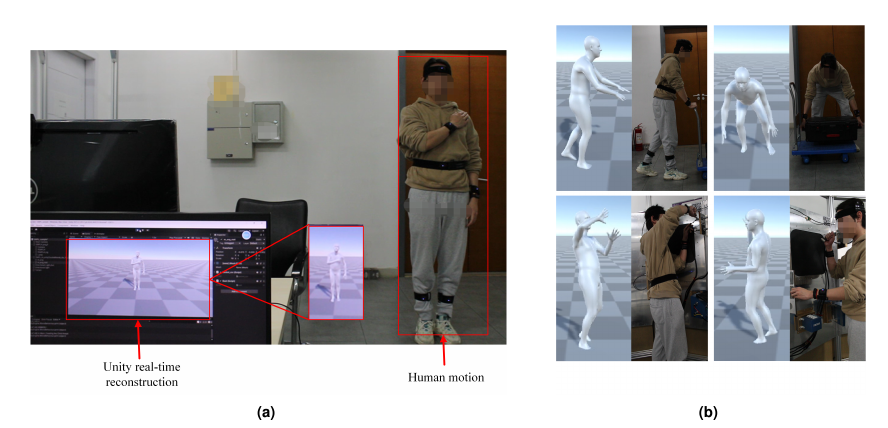
As shown in Fig 2, the method can provide real-time reconstructions of various actions. This work enables the deployment of the model on mobile terminals with limited computational capabilities. As a result, the motion capture algorithm no longer requires a PC for calculation, and instead, the PC only needs to receive the calculated pose data. This advancement holds promising applications in real-time motion capture scenarios involving multiple individuals.
In the future, we will focus on two primary objectives:
1. Improving reconstruction accuracy: We plan to enhance the precision of reconstructions by integrating optimization strategies. Additionally, we may introduce more sensor types to gather detailed information about joint movements and rotations.
2. Implementing root translation estimation: While estimating a person's position using human gait in video demonstrations, we acknowledge the method's inherent imprecision and the potential for error accumulation. Thus, we aim to incorporate more precise positioning techniques, like SLAM, into VR/AR headsets for more dependable and absolute positioning data.
Follow the Topic
-
Nature Communications
An open access, multidisciplinary journal dedicated to publishing high-quality research in all areas of the biological, health, physical, chemical and Earth sciences.

Related Collections
With Collections, you can get published faster and increase your visibility.
Women's Health
Publishing Model: Hybrid
Deadline: Ongoing
Tumor Microenvironment Crosstalk and Therapeutic Implications
Publishing Model: Hybrid
Deadline: Nov 02, 2026


Please sign in or register for FREE
If you are a registered user on Research Communities by Springer Nature, please sign in